





























50
Parameter Descriptions
Honeywell
9
9.2 START/STOP SETUP (CONTROL PANEL: MENU PAR -> P2)
2.1
C
ONTROL
PLACE
With this parameter, the user can select the active control place. The selec-
tions are:
1 =
I/O terminal
2 =
Keypad
3 =
Fieldbus
Note:
Local/Remote control mode can be toggled by pressing the navigation
wheel for 5 seconds. P2.1 will have no effect in local mode.
Local =
Keypad is the control place
Remote =
P2.1 defines the control place
2.2
S
TART
FUNCTION
The user can select two start functions for SmartDrive Compact with this pa-
rameter:
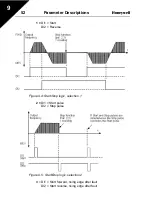
0 = Ramp start
The inverter starts from 0 Hz and accelerates to the set frequency ref-
erence within the set acceleration time (P4.2). (Load inertia or starting
friction may cause prolonged acceleration times).
1 = Flying start
The inverter is able to start also a running motor by applying a small
torque to motor and searching for the frequency corresponding to the
speed the motor is running at. The searching starts from the maximum
frequency towards the actual frequency until the correct value is de-
tected. Thereafter, the output frequency will be increased/decreased
to the set reference value according to the set acceleration/decelera-
tion parameters.
Use this mode if the motor is rotating when the start command is given.
With the flying start, it is possible to ride through short mains voltage
interruptions.
2.3 S
TOP
FUNCTION
Two stop functions can be selected in this application:
0 = Coasting
The motor coasts to a halt without control from the inverter after the
Stop command.







































































