R O B O I
N T E R F A C E
I
N S T R U C C I O N E S
D E
M A N E J O
E
R O B O I
N T E R F A C E
I
N S T R U C C I O N E S
D E
M A N E J O
E
30
31
Asignación de las teclas en el emisor manual IR:
Las salidas del motor M1–M3 de la Interface se dejan activar y desactivar con las respectivas teclas del emisor.
Para M1–M3 se deja conmutar también la velocidad del motor entre ”rápido” y ”lento”.
La salida del motor M4 es activada por las dos teclas 1))) y 2))), con las cuales se conmuta normalmente entre
el Receptor1 y el Receptor 2. La velocidad de M4 no se deja variar con el emisor manual.
Regleta de clavijas de 26 polos (13)
Por aquí se conducen todas las entradas y salidas disponibles otra vez hacia afuera para que, en caso
nece-sario, se pueda cablear fijamente un modelo por un cable de cinta plana o unirlo con la Interface
mediante un solo conector de 26 polos (el conector y el cable de cinta plana se necesitan adicionalmente).
Conector de ampliación para la ROBO I/O-Extension (15)
Con conector de ROBO I/O Extension (No. de art. 93294, necesario adicionalmente), se puede ampliar el
número de las entradas y salidas. Éste posee otras 4 salidas de motor con regulación de la velocidad,
8 entradas digitales y una entrada de resistencia digital para 0–5,5k
Ω
.
Conector de ampliación para ROBO RF Data Link (19)
El ROBO RF Data Link es una radiointerfaz opcional para la ROBO Interface (No. de art. 93295, necesaria
adicionalmente). Con esto ya NO se necesita más un cable de unión entre el PC y la Interface. El RF Data Link
se conecta por el lado del PC a la interfaz USB. Frecuencia: 2,4 GHz, alcance aprox. 10 m.
1
3
5
7
9
11
13
15
17
19
21
23
25
2
4
6
8
10
12
14
16
18
20
22
24
26
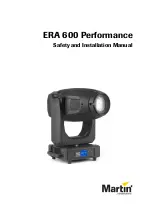
Tensión de alimentación (9V) + para alimentación de
palpadores
Línea de masa para conexiones analógicas / sensor de
distancia / entrada de contador rápido.
¡No utilizar como
contrapolo para las salidas de potencia O1– O8!
AX
AY
A1
A2
Sensor de distancia D1
Sensor de distancia D2
Entrada de contador rápido
Línea de masa como contrapolo para las salidas de
potencia O1–O8
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
I1
I2
I3
I4
I5
I6
I7
I8
O1
O2
O3
O4
O5
O6
O7
O8
1
2
3
4
5
6
7
8
9
10
Programación de la Interface
El software de programación estándar para la ROBO Interface es el lenguaje de programación gráfica ROBO
Pro. La Interface opera en los siguientes modos de servicio:
Modo ”Online”
La Interface está unida continuamente con el PC (cable USB/serial o RF Data Link). El programa se ejecuta en
el PC; la pantalla sirve como superficie de usuario.
Modo ”Intelligent-Interface”
La Interface conmutará al modo ”Intelligent-Interface” accionando el pulsador (5) por lo menos por 3
segun-dos. Este modo de servicio se distinguirá por la intermitencia rápida del LED de la interfaz serial (7). En
este modo de servicio sólo está activa la interfaz serial (con los parámentes 9600,n,8,1). La ROBO Interface
se comportan aquí como una interfaz inteligente (No. de art. 30402). Con ello puede ser manejada con
el software LLWin 3.0 en el modo ”Online”. ¡La carga por download de programas LLWin no es posible! A la
selección automática de interfaces de la ROBO Interface se retorna de nuevo accionando brevemente el
pulsador (5).
Modo”Download”
En este modo de servicio se carga un programa en la Interface y se ejecuta independientemente del PC. En la
memoria FLASH pueden cargarse dos programas distintos. Éstos permanecen almacenados también después
de haber desconectado la alimentación de corriente. También existe la posibilidad de cargar un programa en la
memoria RAM. No obstante, este programa será borrado tan pronto se interrumpa la corriente o se inicie un
programa que se encuentra en la memoria FLASH.
Nota:
El almacenamiento de programas en la memoria RAM se realiza de una manera considerablemente más
rápida que el almacenamiento en la memoria FLASH, ya que la memoria FLASH tiene que ser borrada
primeramente, lo cual dura algunos segundos. Por tal razón, en el estadio de prueba el programa puede
ser cargado primeramente en la memoria RAM. En la memoria FLASH se almacena idealmente sólo la
versión definitiva de un programa. Esto prolonga además la duración de vida útil de la memoria FLASH,
la cual está ”limitada” a unos 100.000 ciclos de escritura.
El modo de cómo se carga un programa en la respectiva memoria de la Interface, se describe en las
instruc-ciones correspondientes al software ROBO Pro..
Con el pulsador (4) se seleccionan, inician y detienen los programas almacenados. Para la selección de
programas se tiene que oprimir duraderamente el pulsador (4). En caso de que en Prog1 haya
sido almacenado un programa, el LED ”Prog1” se encenderá después de haber oprimido el pulsador
aproximadamente 1 segundo. Si se deja oprimido el pulsador, el sistema conmutará a ”Prog2” al cabo de otro
segundo (si allí está almacenado un programa). Después de otro segundo se habría seleccionado el programa
3 en la memoria RAM (ambos LEDs se encienden), si allí se ha almacenado algo. Al cabo de otro segundo se
apagan ambos LEDs, lo cual significa entonces que no está seleccionado ningún programa.
Asignación de las clavijas:
Asignación de
Asignación de conectores
Clavija
Ásignación de las clavijas
Clavija
las clavijas
RoboInterface_E.qxd 07.09.2004 9:47 Uhr Seite 30