R O B O I
N T E R F A C E
O
P E R A T I N G
I
N S T R U C T I O N S
GB+USA
R O B O I
N T E R F A C E
O
P E R A T I N G
I
N S T R U C T I O N S
GB+USA
10
11
ROBO Interface
n
The ROBO interface allows communications between a PC and a model. It transforms the commands from
the software so that, for example, motors can be activated and signals from sensors such as scanners, photo
transistors, reed contacts and NTC resistances etc. can be processed.
Technical Data
(See Fig. 1 p. 3.)
Size and Weight
Casing dimensions, LxWxH, 150x90x34mm, weight about 170g
Power supply 9V —
. . .
, 1000mA (1)/(3)
Two choices are available, either the fischertechnik power unit 9V—
...
, 1000mA, item No. 37109 connected to the
DC socket (1) or the Accu Set item No. 34969 connected to +/– sockets (3). When connecting a power
unit to the DC socket (1), the circuit to the sockets for the battery set (3) is automatically interrupted. After the
power supply is turned on, there is initially a test of all LEDs and then the two green LEDs (6) and (7) blink
alternately. The interface is ready for operation.
Current consumption without connected components: 50mA
Processor and Memory
Processor 16 bit, type M30245, clock frequency 16 MHz, 128 Kbyte RAM, 128 Kbyte flash
Outputs M1–M4 or O1 to O8
(14) Connection of four motors (forwards, backwards, off, eight speed levels) with 9V—
...
, continuous operation
250mA, short-circuit-proof.
As an alternative, up to eight bulbs or electromagnets may be connected to the eight individual outputs O1–O8
(the second pin of the power consumer is connected to the grounding socket (2)).
.
Digital Inputs I1–I8
(12) For digital sensors such as push buttons, photo
transistors and reed contacts. Voltage range: 9V—
...
,
switching threshold for ON/OFF is about 2.6 V,
input resistance about 10k
Ω
.
Analog Resistance Inputs AX and AY
(11) For connection of potentiometers, photo
or NTC resistances.
Measuring range 0–5.5k
Ω
. Resolution 10 bit.
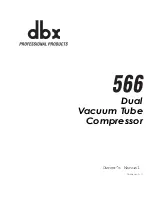
Socket assignment:
l1
l2
X
X
Digital input
+ (switching voltage)
X
X
Casing edge
Socket assignment:
AX
AY
X
X
Analog input
Ground
X
X
Casing edge
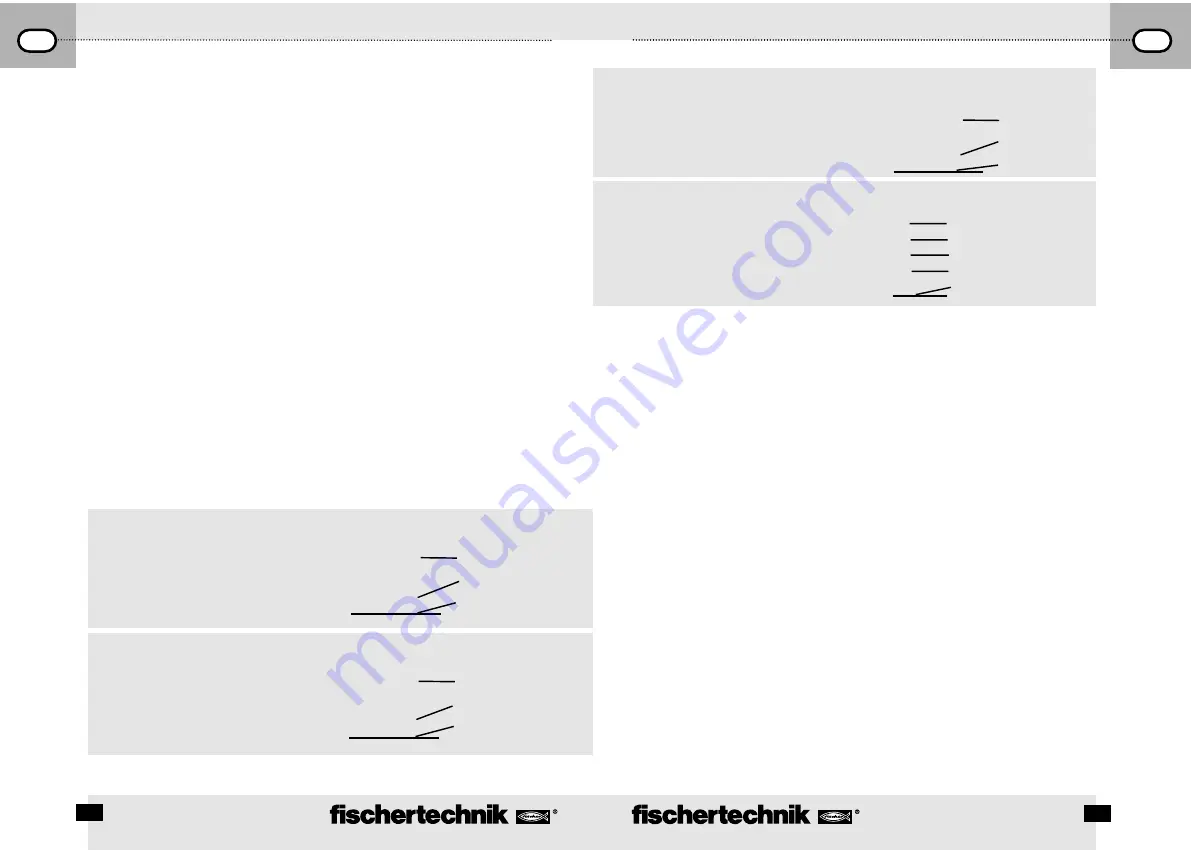
Socket assignment:
A1
A2
X
X
Analog input
Ground
X
X
Casing edge
Socket assignment:
D1–2
X
Input D1
X
Ground
X
Input D2
X
Ground
Casing edge
Analog Voltage Inputs A1 and A2
(10) For connection of analog sensors,
which output a voltage of 0–10 V.
Resolution 10 bit.
Inputs for Gap Sensors D1 and D2
(9) Special connections for two fischertechnik
gap sensors.
Infrared (IR) Inputs
Using the IR receiver diode (18), the keys of the hand transmitter from the IR control set (item No. 30344
is needed as an addition) can be used as digital inputs. Which function the keys are to activate, can be
programmed using the software, ROBO Pro.
Interfaces USB, Serial, IR
The interface is connected over the serial interface (16) or the USB interface (17) with the PC. A connection
cable is supplied for each of the interfaces.
The device is compatible with the USB 1.1 and 2.0 specifications and works with a data rate of 12 Mbit/s.
Selection of the Interface
The selection of the interfaces is done by the programming software. The interface automatically accesses the
interface, from which it is receiving data. Then the LED blinks, which is assigned to the particular interface, (6)
for the USB and (7) for the serial. If data is not received from any interface, then both LEDs blink alternately
(”autoscan mode”).
Fixed Setting for a Certain Interface
By pressing the push button (5), you can select a certain interface. Then the LED for the selected interface lights
up. As soon as data ”flows” over the selected interface, the LED blinks. You can return to automatic interface
selection by pressing push button (5) several times until the LEDs for the serial and the USB interface blink
alternately again.
Infrared (IR) Test Function
If you press the push button (5) several times until the IR LED (8) lights up, then you can control the outputs
of the interface, without connection to the PC directly, through the hand transmitter of the IR control set (item
No. 30344 needed as an addition), for example, for test purposes. If this function is active, then the USB
and the serial interface are shut off. You can return to the automatic interface selection by pressing the push
button (5) several times until the LEDs for the serial and the USB interface blink alternately again.
RoboInterface_GB.qxd 07.09.2004 9:56 Uhr Seite 10