R O B O I
N T E R F A C E
B
E D I E N I N G S H A N D L E I D I N G
NL
R O B O I
N T E R F A C E
B
E D I E N I N G S H A N D L E I D I N G
NL
24
25
Toewijzing van de toetsen van de IR handzender:
De motoruitgangen M1–M3 van de interface kunnen met de overeenkomstige toetsen van de zender in- en
uitgeschakeld worden. Voor M1–M3 kan ook de snelheid van de motor tussen snel en langzaam worden
om-geschakeld.
De motoruitgang M4 wordt met behulp van de beide toetsen 1))) en 2))) geactiveerd, waarmee normaal tussen
ontvanger1 en ontvanger2 wordt omgeschakeld. De snelheid van M4 kan met de handzender niet worden
gewijzigd.
26-polige pencontactaansluiting (13)
Hier worden alle beschikbare in- en uitgangen nogmaals uitgevoerd, zodat men indien noodzakelijk een model
met behulp van een platte bandkabel vast kan aansluiten en via een enkele 26-polige stekker met de interface
kan verbinden (stekker en platte bandkabel zijn noodzakelijk accessoire).
Uitbreidingsstekker voor ROBO I/O-Extension (15)
Met de ROBO I/O-Extension (art.-nr. 93294, noodzakelijk accessoire), kan het aantal in- en uitgangen wor-
den uitgebreid. Hij bezit 4 verdere motoruitgangen met snelheidsregeling, 8 digitale ingangen en een analoge
weerstandsingang voor 0–5,5k
Ω
.
Uitbreidingsstekker voor ROBO RF Data Link (19)
De ROBO RF Data Link is een optionele interface voor de ROBO Interface (art.-nr. 93295, noodzakelijk
ac-cessoire). Daarmee is dan geen verbindingskabel tussen PC en interface meer noodzakelijk! Aan de PC-zijde
wordt de RF Data Link op de USB interface aangesloten. Frequentie: 2,4 GHz, reikwijdte ca. 10m.
1
3
5
7
9
11
13
15
17
19
21
23
25
2
4
6
8
10
12
14
16
18
20
22
24
26
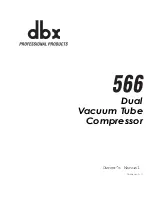
Verzorgingsspanning (9V) + voor toetsenverzorging
Massaleiding voor analoge aansluitingen / afstands-
sensor / snelle telleringang.
Niet als tegen-pool
voor vermogenuitgangen O1..O8 gebruiken!
AX
AY
A1
A2
Afstandssensor D1
Afstandssensor D2
Snelle telleringang
Massaleiding als tegenpool voor de
vermogenuitgangen O1..O8
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
I1
I2
I3
I4
I5
I6
I7
I8
O1
O2
O3
O4
O5
O6
O7
O8
1
2
3
4
5
6
7
8
9
10
Programmering van de interfaces
n
De standaard programmeersoftware voor de ROBO Interface is de grafische programmeertaal ROBO Pro.
De interface werkt in de volgende bedrijfsmodi:
On-linemodus
De interface is continu met de PC verbonden (USB/seriële kabel of RF Data Link). Het programma loopt op de
PC, het beeldscherm dient als bedieningspaneel.
”Intelligent-Interface modus”
Door gedurende minimum 3 seconden op de toets (5) te drukken wordt de interface in de ”Intelligent-Interface
modus” geschakeld. Men herkent deze bedrijfsmodus aan het snelle knipperen van de LED (7) van de seriële
interface. In deze bedrijfsmodus is alleen de seriële interface (met de parameters 9600,n,8,1) actief. De ROBO
Interface gedraagt zich daarbij als een Intelligent-Interface (art.-nr. 30402). Daarmee kan zij met de software
LLWin 3.0 in de on-linemodus bestuurd worden. De download van LLWin programma’s is niet mogelijk! Door
kort op de toets (5) te drukken gaat men weer terug naar de automatische selectie van de interfaces van de
ROBO Interface.
Downloadmodus
In deze bedrijfsmodus wordt een programma op de interface geladen en onafhankelijk van de PC afgewerkt. Er
kunnen 2 verschillende programma’s in het FLASH-geheugen worden geladen. Deze blijven ook behouden na
het uitschakelen van de stroomverzorging. Er bestaat bovendien de mogelijkheid, een programma in het RAM-
geheugen te laden. Dit programma wordt gewist, van zodra de stroomverzorging onderbroken wordt, of een
programma wordt gestart, dat zich in het FLASH-geheugen bevindt.
Tip:
Het opslaan van programma’s in het RAM-geheugen gaat aanzienlijk sneller dan het opslaan in het
FLASH-geheugen, omdat het FLASH-geheugen eerst dient te worden gewist, hetgeen enkele seconden
duurt. In het teststadium kan het programma daarom best eerst in het RAM-geheugen worden geladen.
In het ideale geval slaat men eerst de uiteindelijke versie van een programma op in het FLASH-
geheugen. Dit verlengt bovendien de levensduur van het FLASH-geheugen, dat slechts tot ca. 100 000
schrijfcyclussen is ”beperkt”.
Hoe een programma in het betreffende geheugen van de interface wordt geladen, staat vermeld in de hand-
leiding voor de software ROBO Pro.
Met de toets (4) worden opgeslagen programma’s geselecteerd, gestart en gestopt. Voor de programmase-
lectie dient continu op de toets (4) te worden gedrukt. Indien in Prog1 een programma werd opgeslagen, licht
na ca. 1 seconde op de toets te drukken de LED ”Prog1” op. Indien de toets ingedrukt blijft, wordt na een
volgende seconde naar ”Prog2” omgeschakeld (indien daar een programma is opgeslagen). Na een verdere
seconde zou het programma 3 (beide LED´s lichten op) in het RAM-geheugen geselecteerd zijn (indien er iets
in op-geslagen is). Na een verdere seconde worden beide LED’s uitgeschakeld. Er is dan geen programma
geselecteerd.
Pinbelegung:
Stekkertoewijzing
Pen
Pentoewijzing
Pen
Pen-toewijzing
RoboInterface_NL.qxd 07.09.2004 9:43 Uhr Seite 24