





























6
Control via FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-EN – 2017-05b – English
53
6.2.2
Methods of homing
The homing method to be selected depends on the parameterised axis, application and condition of the
system.
The homing methods are oriented on CANopen CiA 402.
Accuracy of the homing point
To increase the absolute positioning accuracy, the zero pulse of the incremental encoder
can be used for evaluation.
Software end positions
The software end positions are deactivated with the start of homing and activated again
after homing is completed.
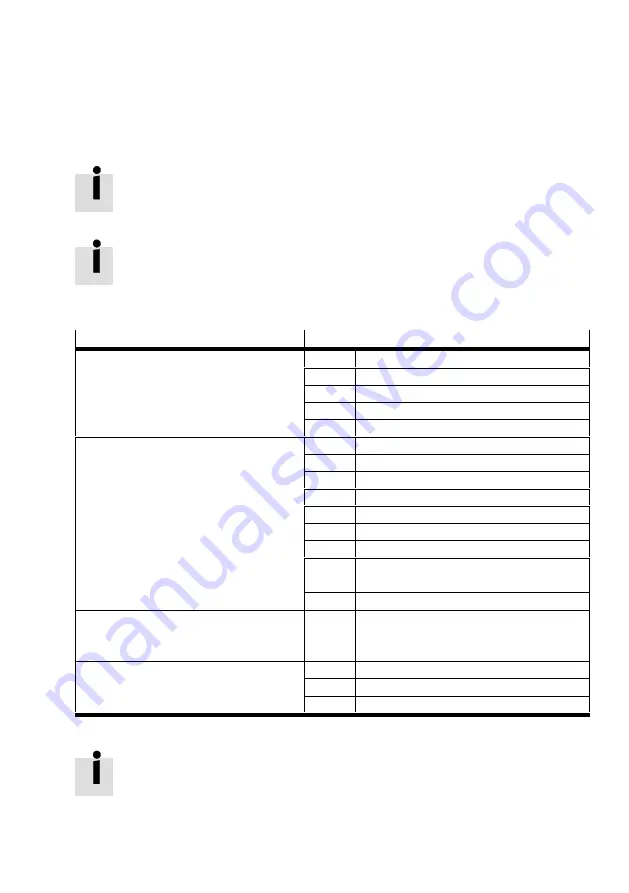
The following homing methods are possible, depending on the motor configuration.
Motor/operation/reference switch
Possible homing methods
Motor with encoder in controlled operation
(closed loop) without reference switch
-35
Current position
33
Current po index – negative direction
34
Current po index – positive direction
-17
Stop – negative direction
-18
Stop – positive direction
Motor with encoder in controlled operation
(closed loop) with reference switch
-35
Current position
33
Current po index – negative direction
34
Current po index – positive direction
-17
Stop – negative direction
-18
Stop – positive direction
27
Reference switch – positive direction
23
Reference switch – negative direction
11
Reference index – negative direc
tion
7
Reference index – positive direction
Motor without encoder or in controlled op
eration (open loop) without reference
switch
-35
Current position
Motor without encoder or in controlled op
eration (open loop) with reference switch
-35
Current position
27
Reference switch – negative direction
23
Reference switch – positive direction
Tab. 6.2
Possible homing methods
Information on the sequence of homing methods
è
equipment and functional descrip
tion of the motor controller, GDCP-CMMO-ST-LK-SY-....
Summary of Contents for CMMO-ST-C5-1-LKP
Page 182: ......







































































