




























198
E300 Installation Guide
Issue Number: 1
Feedback rev
Encoder feedback is reversed
64
The encoder feedback is reversed with regards to the motor power connections and rotation
Recommended actions:
•
Check power connections to the motor and rotation
•
Motor rotation can be reversed with
Reverse motor phase sequence
(
B26
)
•
Check correct connections of the encoder feedback to the drive
•
Encoder feedback can be rotated with
Drive Encoder Feedback Reverse
(
C12
)
Freeze protect
Freeze protection limit exceeded
60
Freeze protection threshold in
Freeze Protection Threshold
(
H28
) has been exceeded,
Recommended actions:
•
Check the temperature setting in
Freeze Protection Threshold
(
H28
)
•
Check the actual temperature in
Monitored Temperature 3
(
J73
)
•
Provide heating, air conditioning, ventilation to support allowable temperature in
Freeze Protection Threshold
(
H28
)
This is a delayed trip, where travel will complete (
Elevator Software State
(
J03
) = 0) and then the drive will trip. If a delayed
trip has been scheduled during travel (
Elevator Software State
(
J03
)
>
0) then
Global Warning
(
L04
) = On (1) indicating
that there is a delayed trip scheduled to occur when travel completes.
I Limit Timeout
Drive has been in current limit (in open-loop mode) for an excessive time
82
In Open loop mode the drive has been in current limit for
Maximum Time In Current Limit
(
H50
) ms. This could be the result
of a mechanical fault.
Recommended actions:
•
Check that the elevator car is free to move.
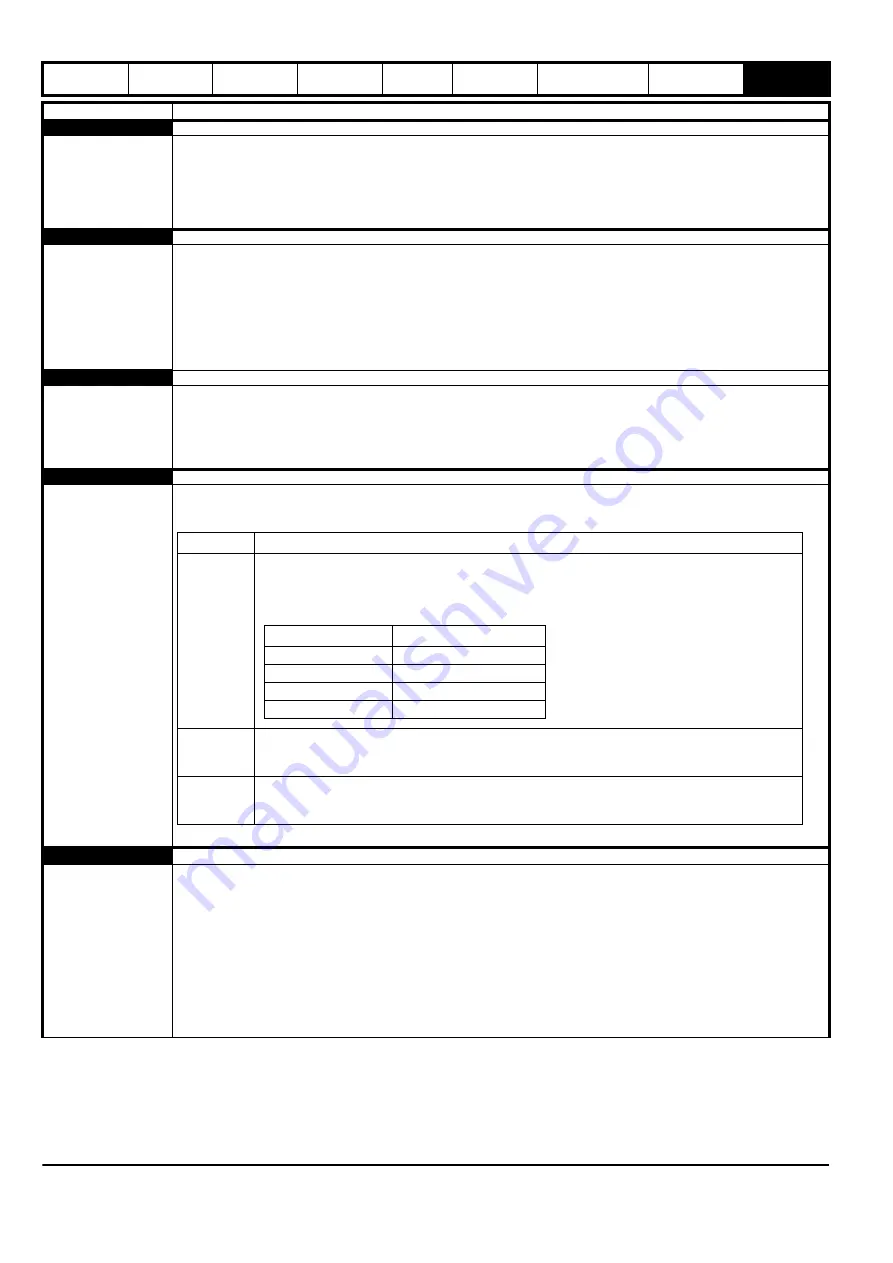
Inductance
Inductance measurement out of range or motor saturation not detected
8
The drive has been enabled in RFC-S mode and sensorless control selected, or for auto-change over on position feedback
loss, and the motor inductance will prevent the control algorithm from operating correctly. The reason for the trip can be
identified from the sub-trip number.
I/O Overload
Digital output overload
26
The I/O
Overload trip indicates that the current drawn from the + 24 V user supply or from the digital output has exceeded
the limit. The trip is initiated for the following conditions:
•
Maximum output current from one digital output is > 100 mA.
•
The combined maximum output current from outputs 1 and 2 is > 100 mA
•
The combined maximum output current from output 3 and +24 V output is > 100 mA
Recommended actions:
•
Check for correct control wiring
•
Check control wiring is undamaged
•
Check for system fault resulting in user power supply becoming overloaded
•
Check total loading on digital outputs
•
Reduce loading
Trip
Diagnosis
Sub-trip
Reason
1
The difference between
Transient Inductance Ld
(
B33
) and
No Load Lq
(
B37
) is too small. B37 - B33)
/ B33 and must be greater than 0.2. Also B37 - B33
must be greater than K /
Drive Full Scale Current
Kc
(
J06
), K is related to the drive rated voltage as given in the table below.
It is recommended that the differences are larger than the minimum limits above if possible.
2
A test is carried out to determine the direction of the flux in the motor which relies on detecting motor
saturation. If a change in motor saturation cannot be detected during this test then this trip is initiated.
This type of failure is unlikely in most normal motors.
3
During the stationary auto-tuning in RFC-S mode it is necessary to determine the location of the flux
axis. If a change in motor saturation cannot be detected during this test then this trip is initiated. This
type of failure is unlikely in most normal motors.
Drive rated voltage
K
200 V
0.037
400 V
0.073
575 V
0.087
690 V
0.105
Summary of Contents for E300 Series
Page 211: ......
Page 212: ...0479 0005 01 ...







































































