





























200
300
400
500
0
40
60
80
100
120
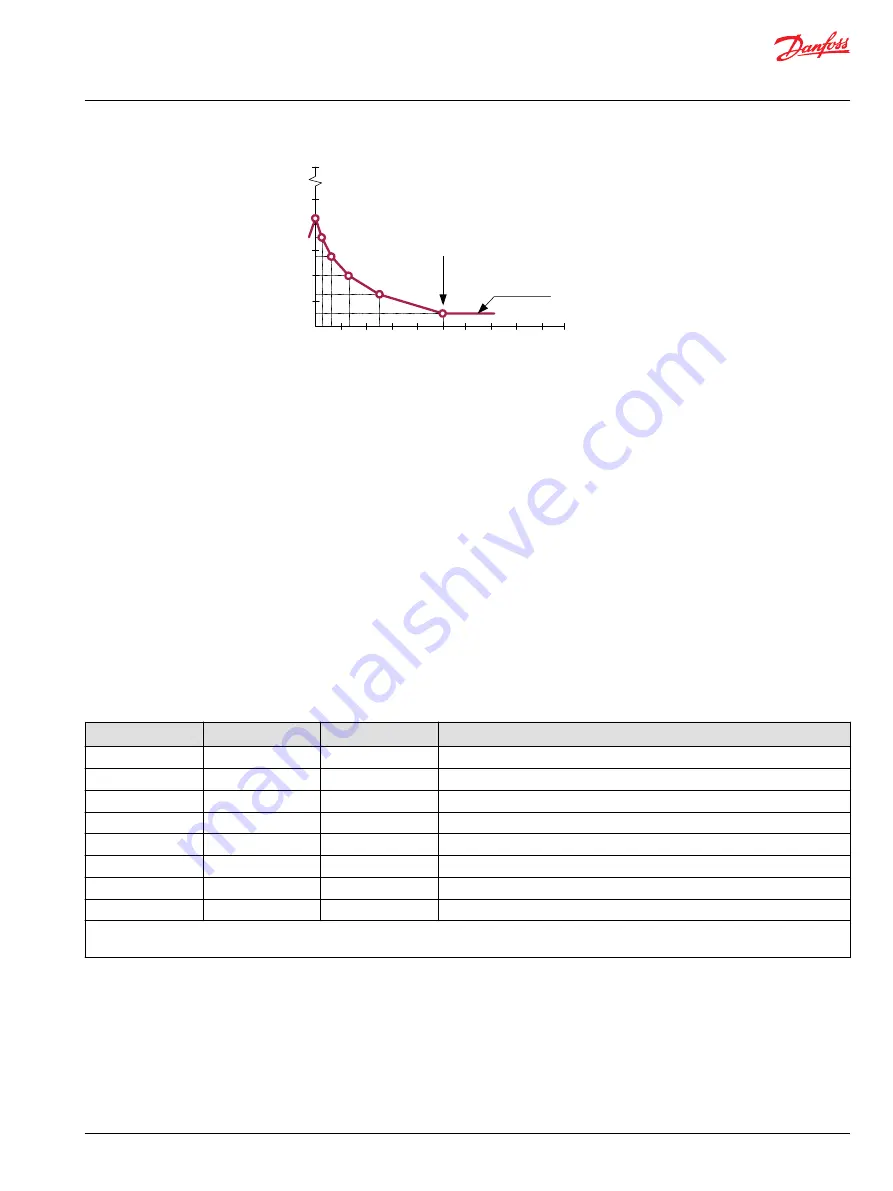
Sts0=105
Sts1=90
Sts2=75
Sts3=60
Sts4=45
Sts5=30
St
eer
ing sensitivit
y S
ts
(V
e)
Ve - Vehicle speed: 1 unit = 0.1 km/h
Vesm=500
Sts
(Ve)
saturates
max Sts = 1200
700
800
900
600
1000
min Sts = 20
100
P005 088E
Sse Selects between a fixed steering sensitivity, variable to steering actuator position or vehicle speed.
Set Sse to 3 to select the sensitivity related to vehicle speed.
Sts0 Sets the linear gradient between steering angle and requested port flow when the vehicle is
standing still. When the vehicle signal unintentionally not is mapped, Sts0 is applied constantly since
variable Ve remains 0. In case the vehicle signal not is diagnosed, it is recommended to set Sts0 at a value
where sufficient directional stability at maximum vehicle speed is present
Sts1 Sets the linear gradient between steering angle and requested port flow when the vehicle is driving
at 6.25% of the speed defined by parameter Vesm.
Sts2 Sets the linear gradient between steering angle and requested port flow when the vehicle is driving
at 12.50% of the speed defined by parameter Vesm.
Sts3 Sets the linear gradient between steering angle and requested port flow when the vehicle is driving
at 25.00% of the speed defined by parameter Vesm.
Sts4 Sets the linear gradient between steering angle and requested port flow when the vehicle is driving
at 50.00% of the speed defined by parameter Vesm.
Sts5 Sets the linear gradient between steering angle and requested port flow when the vehicle is driving
at 100.00% of the speed defined by parameter Vesm.
Vesm Sets the region where steering sensitivity is variable to vehicle speed.
Symbol
Index
Default
Value range
Sse
4y09
1
Must be set at 3
Sts0
4y10
105
20 to 1200 (Amplification of 0.2 to 12.00)
Sts1
4y11
90
20 to Sts0
Sts2
4y12
75
20 to Sts1
Sts3
4y13
60
20 to Sts2
Sts4
4y14
45
20 to Sts3
Sts5
4y15
30
20 to Sts4
Vesm
4y16
500
1 (0.1 km/h) to 1000 (100.0 km/h)
Please note the parameter dependency of Sts.
See Mapping steering signals and J1939 Vehicle Speed to acquire “ Vehicle speed”
Ramps (Anti-jerk)
Ramps are normally used to minimize jerk forces in machines with articulated steered steering systems. In
these steering systems, the articulating masses can be instantly stopped by closing the valve oil flow. An
instant cylinder movement stop starts the articulating masses to oscillate until all kinetic energy is
dispatched into heat by the shock valves or by the friction between wheels and ground. Jerk is an
inherent characteristic of articulated steered vehicles and cannot be completely removed. However, it is
best minimized when the forces are monotonically reduced in magnitude.
Operation Manual
PVED-CL Controller for Electro-Hydraulic Steering, Version 1.38
Steering by Low Priority Steering Device – Open Loop
©
Danfoss | May 2016
11025583 | AQ00000216en-US0302 | 81