





























The overall goal with the parameter is too optimize steering response time without degrading the anti-
jerk performance. Set up fast ramp down time Tfr before tuning this parameter. Setting YsetFr to 1000
eliminates the effect of the fast ramp down.
Typical settings are 500-800. Use trial and error.
Example:
A value of 800 can be interpreted as allowing the spool to ramp down with a fast ramp for flow requests
between maximum flow (1000) and 800/1000 of maximum flow.
Tfr This time defines the applied ramp time in the fast ramp-down range. It is defined as the ramp time
from maximum flow to no flow. This means that in practice, the actual fast ramp-down time is
proportional to the fast ramp-down range divided by 1000.
Use this optimization criterion: Ramp down as fast as possible for flow ranges, where jerks are not
significant. Typical values are 1-50 ms. The fast ramp down time shall always be less than the slow ramp-
down time. Once the value is set, it should not be adjusted anymore during further ramp parameter
optimization.
YAbortDownRamp To come around the problem of slow steering response for large down-ramp times,
especially if a sudden emergency change of direction is needed, a slow down-ramp can be aborted by
requesting a flow in the opposite direction. Once a slow down-ramp is aborted, an abort down-ramp
time, Tra is applied. Obviously Tra shall be significantly smaller than the slow down-ramp to get any
effect.
Example:
A value equal to 500 means that the driver needs to steer out 500/1000 of maximum flow before the slow
down-ramp is aborted. 500 again corresponds to a certain steering wheel RPM.
Typical values are 100-300 to have the abort down ramp possibility and to avoid unintentional abort of
the down ramp due to steering wheel activation due to vibrations. Setting the value to 1000 disables the
abort down ramp functionality.
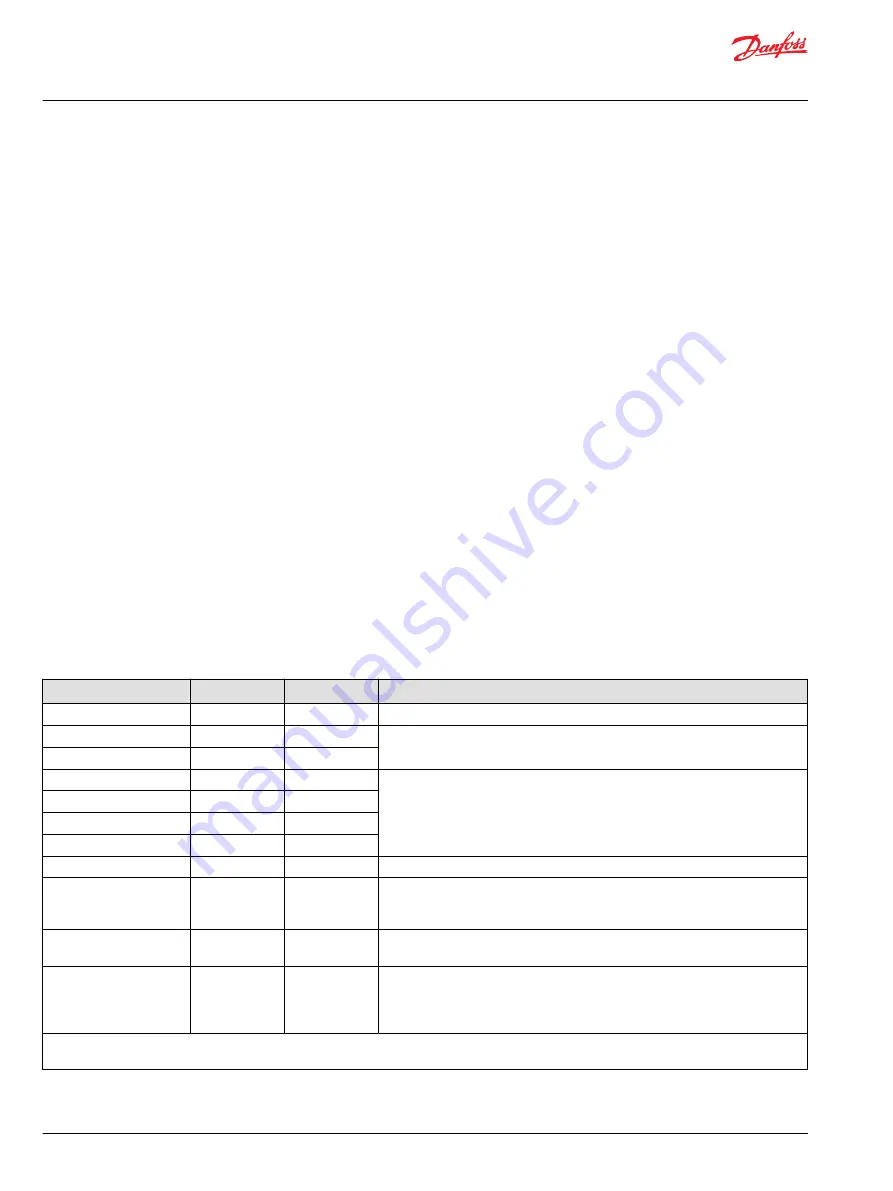
Symbol
Index
Default
Value range
Sr
1y17
0
must be set to 1
Lr
1y19
0
0 (linear ) to 10 (max progressive)
Lf
1y20
0
Tro
1y21
1
1 to 1000 ms
Tfo
1y23
350
Trh
1y22
1
Tfh
1y24
350
Verm
1y25
500
1 to 1000 (1 unit is 0.1 km/h)
YsetFr
1y32
1000
0 to 1000 (1 unit = 0.1% of max. flow)
Fast ramp-down is active in the port flow request range 1000 to YsetFr. The default
value disables fast ramp-down.
Tfr
1y33
100
1 to 1000 ms.
Tfr shall be smaller than Tfo and less than 150 ms.
YAbortDownRamp
1y34
0
0 to 500 (1 unit = 0.1% of max. flow).
The default value will force an down-ramp abort at a slight reverse port flow
request. Typically YAbortDownRamp needs be increased to avoid unintentional
down-ramp aborts as this will infer a jerk on the driver.
The discontinuities in the progressive characteristic are located at 50, 120 and 333.
([5.0;T at 25], [12,0;T at 50] and [33.3;T at 75] of max port flow capacity)
Operation Manual
PVED-CL Controller for Electro-Hydraulic Steering, Version 1.38
Steering by Steering Wheel – Open Loop
48 |
©
Danfoss | May 2016
11025583 | AQ00000216en-US0302