





























Steering by Low Priority Steering Device – Open Loop
EHPS Type 2 System Diagram
Low
priority
Q
Steering
cylinder
EHPS Valve
Automatic steering
OSP
PVE
Steering angle sensor
Position
sensor
Vehicle speed
Joystick or mini wheel
Steering
cylinder
EHPS valve
OSP
PVE
Q
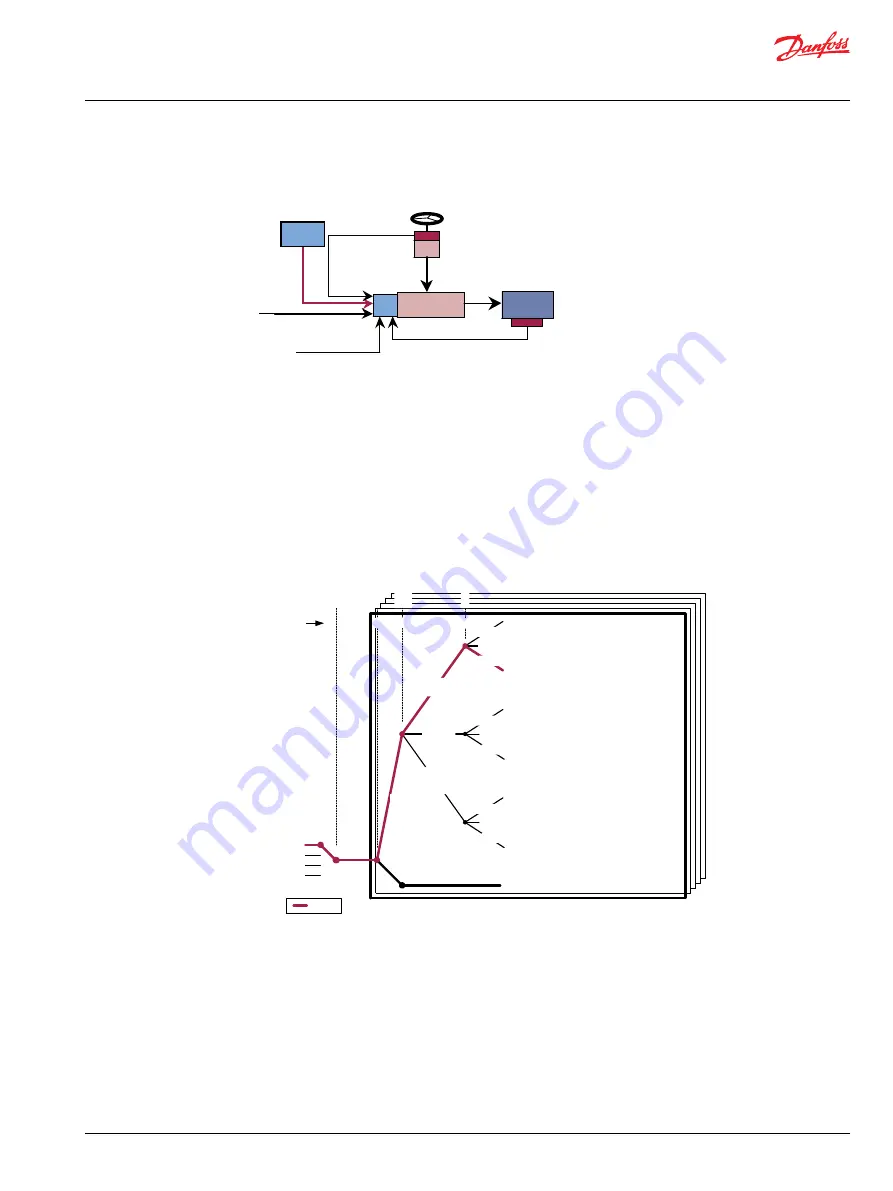
Functionality Tree
The tree below illustrates the availability of the PVED for steering by joystick, mini wheel with speed
output or by potentiometer-like steering devices. The manufacturing default functionality is found by
following the red line. Following the instructions in this chapter can of course modify the default. The
switches in the tree are used to select the functionality required. In case different functionalities are
required, the EHPS software provides 5 programs from which the driver can select when the system is
fully operative.
Open loop, fixed sensitivity, with fixed ramp
times
Related to
position of
steering
actuator
Sse = 2
Related to
vehicle speed
Sse=3
Open loop, fixed sensitivity, with no
ramps applied
Open loop, sensitivity related to steering actuator
position, with fixed ramp times
Open loop, sensitivity related to steering actuator
position, with no ramps applied
Open loop, sensitivity related to vehicle speed, with
fixed ramp times
Open loop, sensitivity related to vehicle speed,
with no ramps applied
Closed loop, Fixed sensitivity, no ramps possible
Closed loop
Cp=255
Fixed Sr=1
No Sr=0
Var Sr=2
C
on
tr
ol pr
inciple swit
ch
Sensitivit
y swit
ch
R
amp swit
ch
Open loop, fixed sensitivity, with ramp times
related to vehicle speed
Open loop, sensitivity related to steering actuator
position, with ramp times related to vehicle speed
Open loop, sensitivity related to vehicle speed, with
ramp times related to vehicle speed
Cp
Sse
Sr
Switches
No signal (0)
AD1 (1)
AD2 (2)
CAN (4)
C
hannel mapping swit
ch
Fixed
Sse=1
Open loop
Cp=0
default
P005 099E
Fixed Sr=1
No Sr=0
Var Sr=2
Fixed Sr=1
No Sr=0
Var Sr=2
*
* Sensitivity means: Port flow amplification
Y=0
1
2
3
4
Program number: Y
Select the Control Principle
The PVED-CL provides open loop control for steering devices with spring return or for steering devices
with a speed output,. This control principle keeps a fixed or variable relation between steering input and
cylinder speed. The control loop provides several parameters to transform positional information to port
flow.
Cp is used to select open loop control for joystick steering by setting parameter index 4y02 equal to 0.
Parameter selection values: Y selects the program and ranges from 0 and 9.
Operation Manual
PVED-CL Controller for Electro-Hydraulic Steering, Version 1.38
Steering by Low Priority Steering Device – Open Loop
©
Danfoss | May 2016
11025583 | AQ00000216en-US0302 | 77