





























Device Diagnostic Operation
The steering device diagnostic checks are performed both when the device is enabled and disabled.
Enable or Disable Joystick Steering Device
The device enable/disable control is executed by means of the DisableSteeringDevice command (see
PVED-CL Communication Protocol Technical Information
, 11079551) from e.g. the man machine interface.
The DisableSteeringDevice command options are:
•
Arm joystick enable/disable
•
Enable joystick
•
Disable joystick
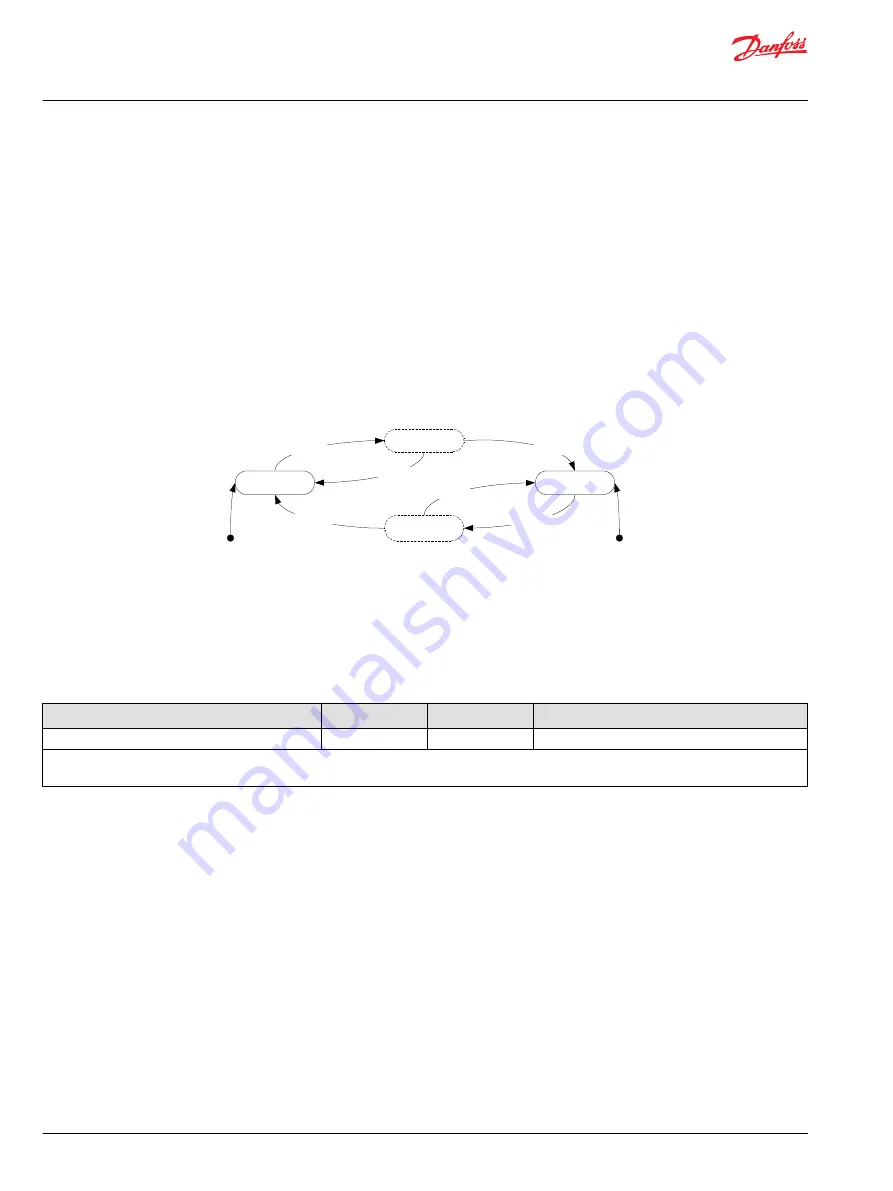
The enabling or disabling of a steering device must follow the state transition sequence shown below in
order to minimize undesired enabling or disabling of a steering device.
Device disabled
Device enabled
Device disabled
armed
Device enabled
armed
control byte = Enable device
control byte = Disable device
control byte = Arm device enable
control byte = Arm device disable
timeout or incorrect control byte
timeout or incorrect control byte
Disabled at power-up = TRUE
Disabled at power-up = FALSE
The states, device enabled armed and device disabled armed are volatile states. A transition from these
states to the desired state requires reception of a command message within 200 ms after the reception of
first command message. Otherwise the device disable state will change back to its last state.
Boot-up State of Steering Device
The boot-up enable/disable state of the device can be configured with a parameter and can be changed
via the SetParameter command (see
PVED-CL Communication Protocol Technical Information
, 11079551).
Symbol
Index
Default
Value range
HPStdDisabledAtBootUp
64008
0
0 (FALSE), 255 (TRUE)
HpStd means High Priority Steering Device.
If the device disable functionality is not desired, the parameter shall be 0.
Getting the Actual Enable/disable Status of the Device
The PVED will send one DisableSteeringDeviceResponse reply message to each DisableSteeringDevice
command it receives (or on time-out), containing the present enable/disable state for all steering devices.
This reply may be used by the MMI for acknowledge or display purposes (see
PVED-CL Communication
Protocol Technical Information
, 11079551).
The device enable/disable present status for all devices is also transmitted periodically in the
OperationStatus message which is transmitted on the CAN bus by default (see
PVED-CL Communication
Protocol Technical Information
, 11079551).
Operation Manual
PVED-CL Controller for Electro-Hydraulic Steering, Version 1.38
Steering by High Priority Steering Device – Closed Loop
76 |
©
Danfoss | May 2016
11025583 | AQ00000216en-US0302