





























42
Epsilon EP-P Drive Reference Manual
www.controltechniques.com
Revision: A4
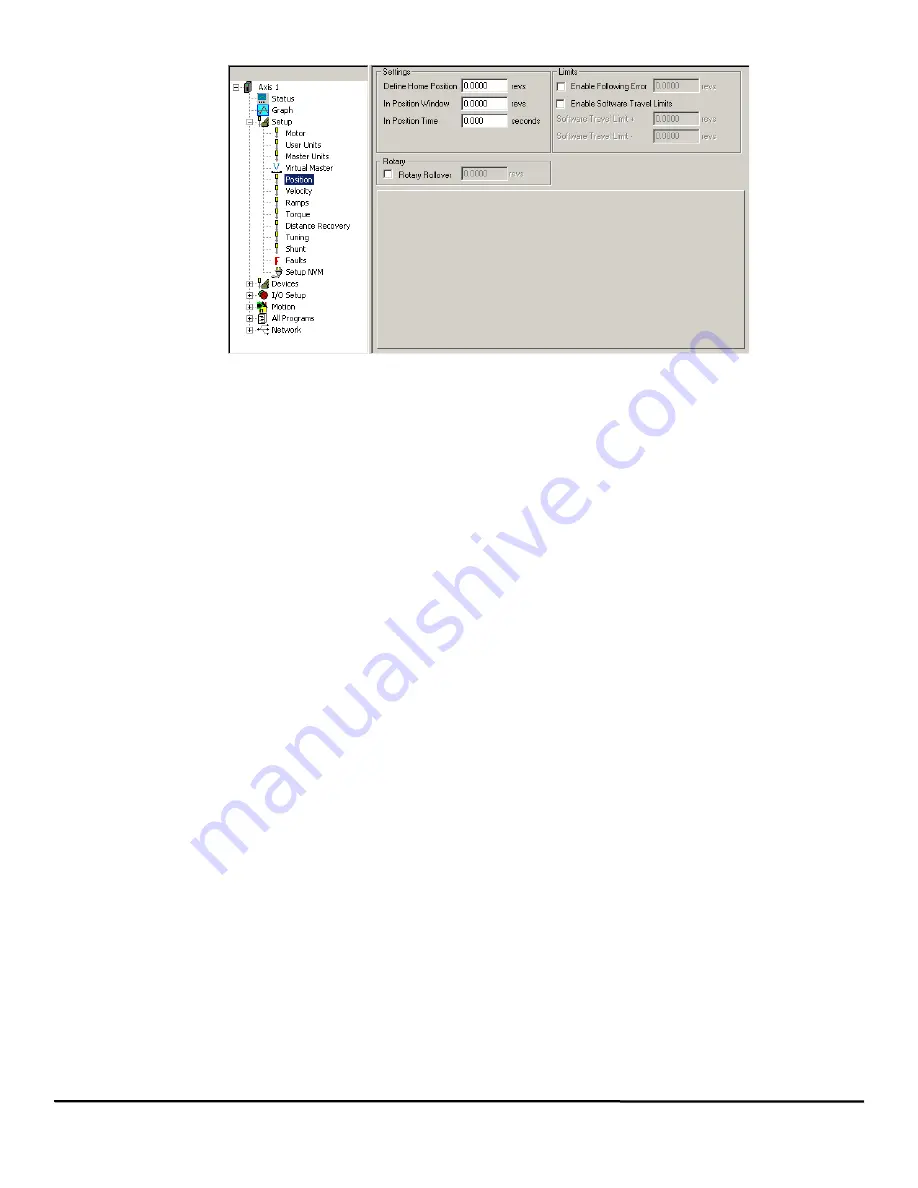
Figure 44:
Position View
3.9.1
Settings Group
Define Home Position
Define Home Position (DefineHomePosn) is the value to which the Position Command will be set when the DefineHome destination is
activated. This is used in applications which do not use a home routine but, require a known reference point. The units are defined on the User
Units View.
In Position
The In Position (InPosn) source will activate at the end of a move if the absolute value of following error is less than or equal to the In Position
Window (InPosnWindow) for the In Position Time (InPosnTime).
In Position Window (InPosnWindow)
The absolute value of the Following Error must be less than or equal to this value at the end of an index in order for the InPosn source to
activate. This window is set in units specified in the User Units View.
Example:
The In Position window is set to 0.0025 revs. At the end of an index, the following error is calculated to be 0.0012 revolutions. Therefore,
the InPosn source will activate.
Or the In Position window is set to 0.001 inches. If at the end of an index, the following error is calculated to be.0015 inches, then the InPosn
source will not activate.
In Position Time (InPosnTime)
This is the amount of time in seconds that commanded motion must be complete and the absolute value of the following error must be less
than the In Position Window for the InPosn source to activate. If set to zero (default), then InPosn will activate as soon as motion stops and the
following error is less than the In Position Window parameter value.
3.9.2
Limits Group
Enable Following Error Check Box
Select this check box (FollowingErrorEnable) to enable (or disable if the check box is clear) the Following Error Limit. If enabled, a fault will be
generated if the absolute value of the following error ever exceeds the value in the following error parameter. If disabled, a fault will never be
generated.
Following Error
Following Error (FollowingError) is the difference between the Position Command and the Position Feedback. It is positive when the Position
Command is greater than the Position Feedback. If the absolute value of the following error exceeds the value you enter here, the drive will
generate a Following Error Fault (F). All accumulated Following Error will be cleared when the drive is disabled.
The Following Error Limit is defined in user units.
Enable Software Travel Limits Check Box
Select this check box (SoftwareTravelLimitEnable) to enable (or disable if clear) the software travel limits. If disabled, the software travel limits
are not monitored.
Software Travel Limits
Software Travel limits can be used to limit machine travel. They are often setup inside the hardware travel limits to add another level of security
or protection from exceeding the machines travel limits. The Epsilon EP-P drive constantly monitor the feedback position, and if this position
exceeds the values entered for Software Travel Limit + or -, then the drive will decel to a stop. Software Travel Limits are not functional unless
the Absolute PosnValid source is active. AbsolutePosnValid is active upon successful completion of a home or the DefineHome destination is
activated.
To recover from a software travel limit, a jog may be commanded in the opposite direction of travel. For example, if a software travel limit - is
Summary of Contents for Epsilon EP-P
Page 2: ......
Page 124: ...110 Epsilon EP P Drive Reference Manual www controltechniques com Revision A4...
Page 200: ...186 Epsilon EP P Drive Reference Manual www controltechniques com Revision A4...
Page 218: ...204 Epsilon EP P Drive Reference Manual www controltechniques com Revision A4...
Page 238: ...224 Epsilon EP P Drive Reference Manual www controltechniques com Revision A4...
Page 244: ...230 Epsilon EP P Drive Reference Manual www controltechniques com Revision A4...
Page 247: ......







































































