





























InteliNano-NT Plus, SW version 2.0.1.x,
©ComAp – July 2015
75
11
ECU
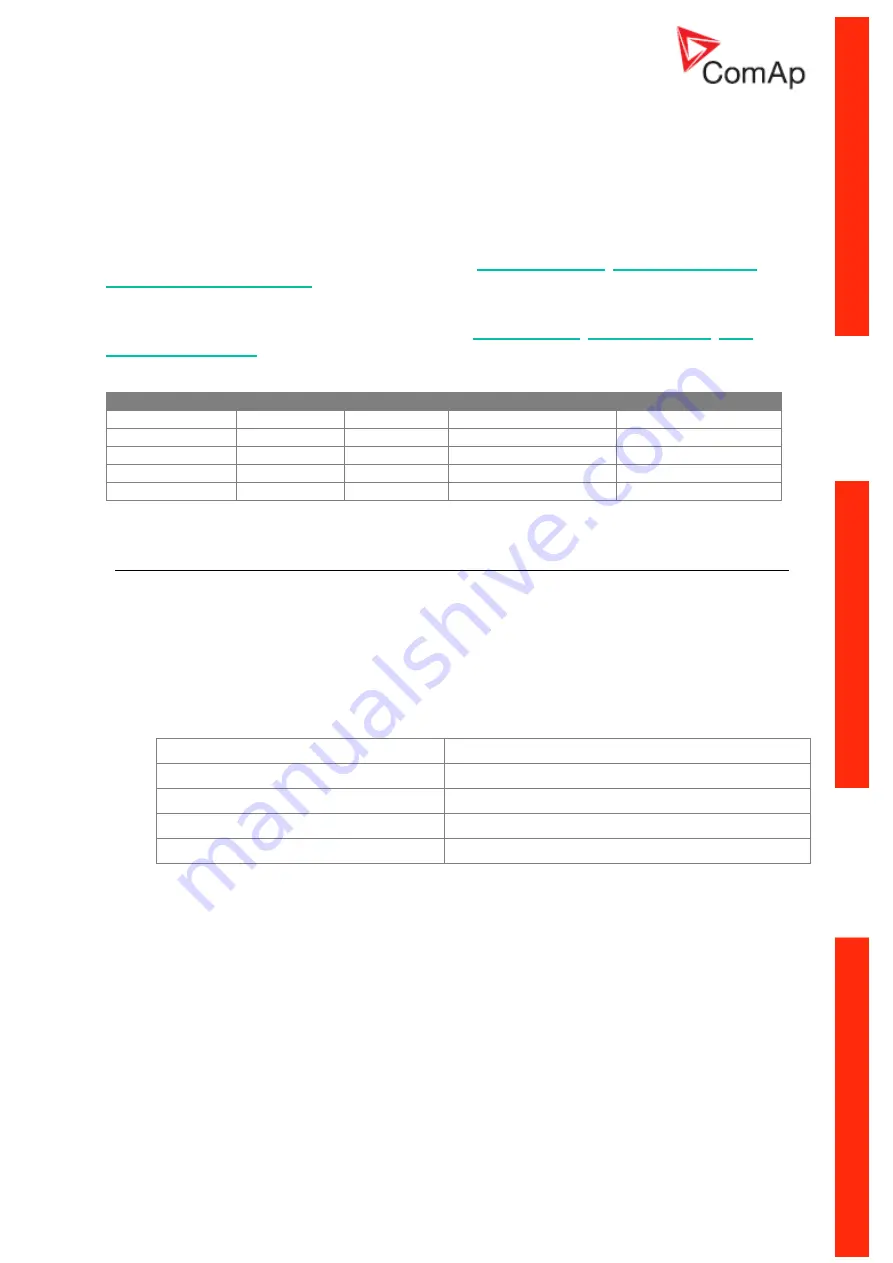
For ECU configuration you have to use PC software NanoEdit. It is impossible to configure ECU via
controller’s front fascia.
If ECU is configured simultaneously with analog inputs (
) value from analog measurement will be displayed and used for
protection.
If ECU is configured simultaneously with binary inputs (
) value from ECU will be displayed. For protections is used value from ECU and
binary input signal. For more detail see example.
ECU configured Analog input Binary input
Protections from
Displayed value from
yes
no
no
ECU
ECU
yes
yes
no
analog input
analog input
yes
no
yes
ECU or binary input
ECU
yes
yes
yes
analog or binary input
analog input
no
no
yes
binary input
binary input status
CAN bus wiring
11.1
The wiring of CAN bus communication should be provided so that following rules are kept:
Maximal length of the CAN bus depends on the communication speed. For the speed of
250kbps, which is used on the CAN for communication with ECU the maximal length is 200m.
The bus must be wired in linear form with termination resistors at both ends. No nodes except
on the controller terminals are allowed.
Use cable with following parameters:
Cable type
Shielded twisted pair
Impedance
120Ω
Propagation velocity
>= 75% (delay <= 4.4 ns/m)
Wire crosscut
>= 0.25mm
2
Attenuation (@1MHz)
<= 2dB/100m







































































