





























Commissioning
Note
Using the Drive Manager from revision -0019
The Drive Manager is only supported from
revision -0019 [
}
191]
of the EL72x1-0010. If you
use an older version, the settings have to be made manually. See sections "
CoE settings
[
}
93]
" and "
NC settings [
}
97]
"
Table of contents
• Start-up with the Drive Manager [
}
89]
• Setting further parameters with the Drive Manager [
}
92]
- Integral velocity controller component Tn [
}
92]
- Proportional velocity controller component Kp [
}
93]
The TwinCAT Drive Manager is available for
download in the AX5000 download package
.
The TwinCAT Drive Manager for parameterizing an EL72x1-0010 servo terminal is integrated in the System
Manager, so that no separate configuration tool is required. Once a servo terminal has been detected or
entered, the TwinCAT Drive Manager is available in the Configuration tab.
The following instructions are intended to enable you to start up the servo terminal relatively quickly. More
detailed information on the Drive Manager can be found in the corresponding documentation "
AX5000
Introduction in the TCDrivemanage
r"
Start-up with the Drive Manager
• The terminal must already have been added manually under I/O devices or have been scanned in by
the system (see section "
Configuration set-up in TwinCAT [
}
52]
")
• The terminal must already be integrated in the NC (see section "
Integration in the NC configuration
[
}
85]
")
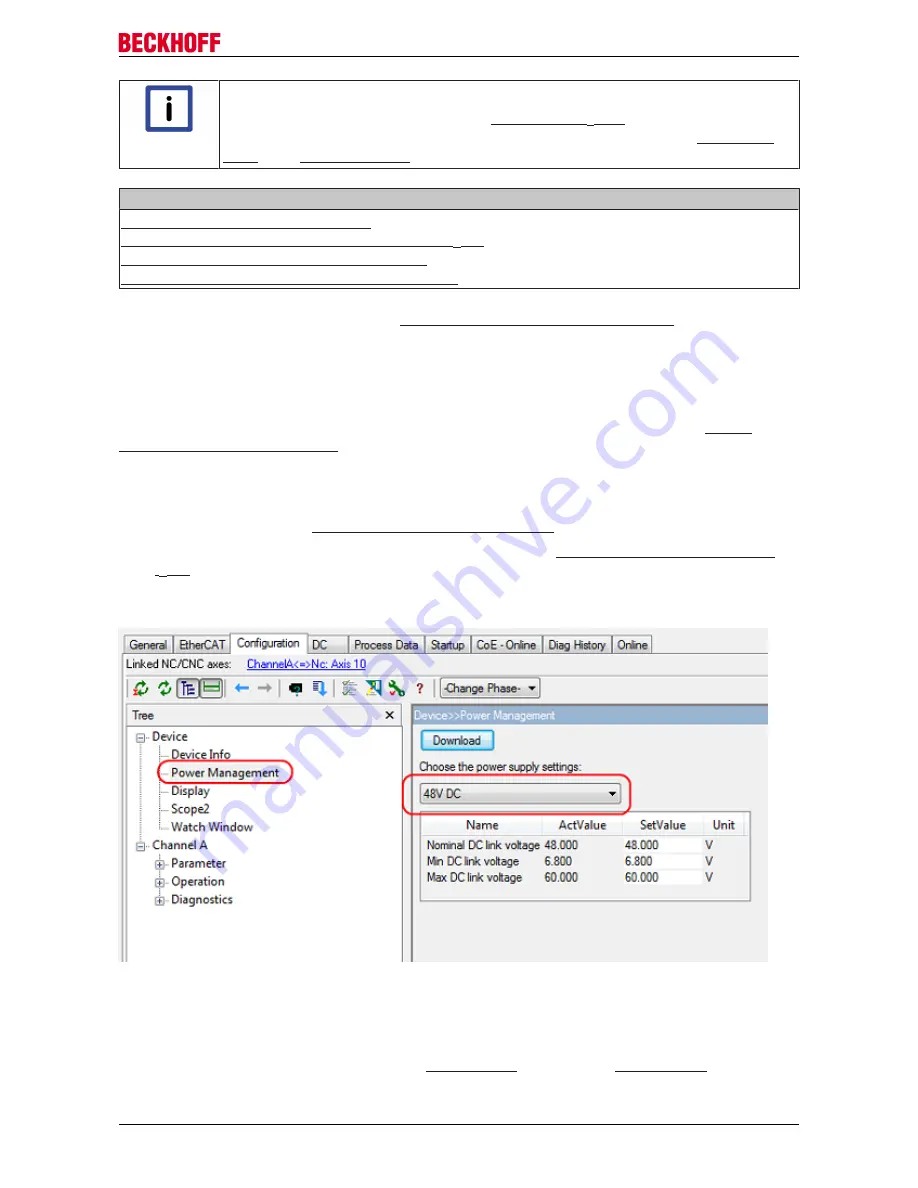
• Select the
Configuration
tab for the EL72x1-0010.
• Select the connected voltage under
Power Management
.
Fig. 110:
Selecting the connected voltage
• You can subsequently scan or select the connected motor under
Motor and Feedback
. If you decide to
use automatic scanning, click on
Scan motor and feedback
. The electronic type plate of the AM81xx-
x2xx motor will then be read automatically. To do this it is necessary for automatic scanning of the
motor to be activated in the terminal (Index
0x8001 [
}
165]
, MDP or Index
0x2018 [
}
149]
, DS402)
EL72x1-0010
89
Version: 2.0
Summary of Contents for EL7201-0010
Page 2: ......
Page 47: ...Commissioning Fig 42 TCP IP setting for the Ethernet port EL72x1 0010 47 Version 2 0 ...
Page 57: ...Commissioning Fig 61 EtherCAT terminal in the TwinCAT tree EL72x1 0010 57 Version 2 0 ...
Page 119: ...Commissioning Fig 148 Touch Probe inputs EL72x1 0010 119 Version 2 0 ...
Page 138: ...Commissioning Fig 168 Process Data tab SM2 EL72x1 0010 default EL72x1 0010 138 Version 2 0 ...
Page 142: ...Commissioning Fig 171 Process Data tab SM2 EL72x1 0010 default EL72x1 0010 142 Version 2 0 ...