





























Product overview
Servomotor
The servomotor is an electrical motor. Together with a servo amplifier the servomotor forms a servo drive.
The servomotor is operated in a closed control loop with position, torque or speed control.
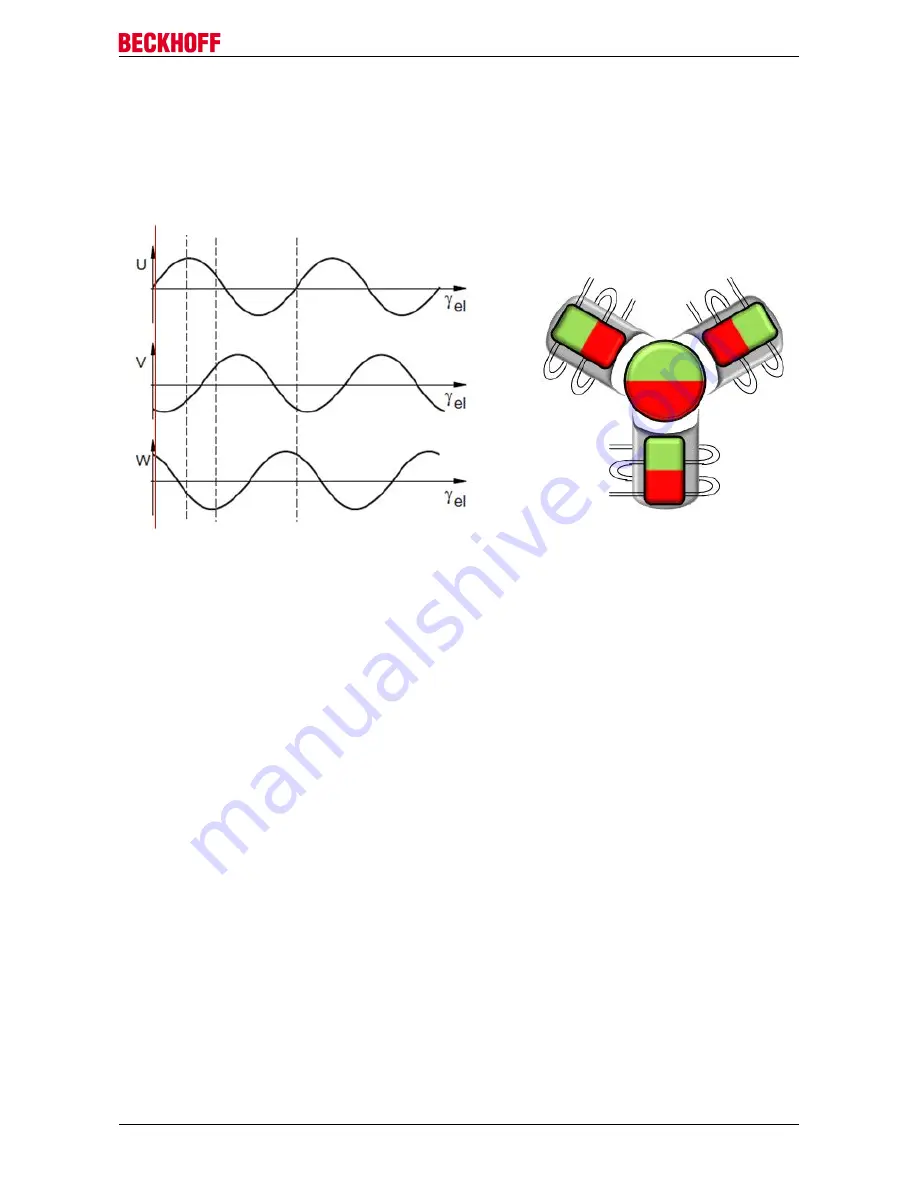
The EL72x1-0010 servo terminal supports control of permanent magnet synchronous motors. These consist
of 3 coils which are offset by 120° and a permanent magnet rotor.
Fig. 10:
Three synchronous motor coils, each offset by 120°
Servomotors particularly demonstrate their advantages in highly dynamic and precise positioning
applications:
• very high positioning accuracy in applications where maximum precision is required through integrated
position feedback
• high efficiency and high acceleration capacity
• servomotors are overload-proof and therefore have far greater dynamics than stepper motors, for
example.
• load-independent high torque right up to the higher speed ranges
• maintenance requirements reduced to a minimum
The EtherCAT servomotor terminal offers users the option to configure compact and cost-effective systems
without having to give up the benefits of a servomotor.
The Beckhoff servo terminal
The EL72x1-0010 is a fully capable servo drive for direct connection to servomotors in the lower
performance range. There is no need for further modules or cabling to make a connection to the control
system. This results in a very compact control system solution. The E-bus connection of the EL72x1-0010
makes the full functionality of EtherCAT available to the user. This includes in particular the short cycle time,
low jitter, simultaneity and easy diagnostics provided by EtherCAT. With this performance from EtherCAT the
dynamics that a servomotor can achieve can be used optimally.
With a rated voltage up to 50 V
DC
and a rated current of up to 4.5 A, this enables the user to operate a
servomotor with a power of up to 276 W. Permanent magnet synchronous motors with a rated current of up
to 4.5 A can be connected as loads. The monitoring of numerous parameters, such as overvoltage and
undervoltage, overcurrent, terminal temperature or motor load, offers maximum operational reliability.
Modern power semiconductors guarantee minimum power loss and enable feedback into the DC link when
braking.
EL72x1-0010
15
Version: 2.0
Summary of Contents for EL7201-0010
Page 2: ......
Page 47: ...Commissioning Fig 42 TCP IP setting for the Ethernet port EL72x1 0010 47 Version 2 0 ...
Page 57: ...Commissioning Fig 61 EtherCAT terminal in the TwinCAT tree EL72x1 0010 57 Version 2 0 ...
Page 119: ...Commissioning Fig 148 Touch Probe inputs EL72x1 0010 119 Version 2 0 ...
Page 138: ...Commissioning Fig 168 Process Data tab SM2 EL72x1 0010 default EL72x1 0010 138 Version 2 0 ...
Page 142: ...Commissioning Fig 171 Process Data tab SM2 EL72x1 0010 default EL72x1 0010 142 Version 2 0 ...