





























292
4317I–AVR–01/08
AT90PWM2/3/2B/3B
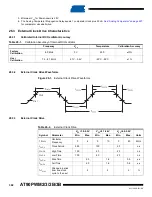
Figure 25-6. Mapping Between BS1, BS2 and the Fuse and Lock Bits During Read
25.8.13
Reading the Signature Bytes
The algorithm for reading the Signature bytes is as follows (refer to
for details on Command and Address loading):
1.
A: Load Command “0000 1000”.
2.
B: Load Address Low Byte (0x00 - 0x02).
3.
Set OE to “0”, and BS1 to “0”. The selected Signature byte can now be read at DATA.
4.
Set OE to “1”.
25.8.14
Reading the Calibration Byte
The algorithm for reading the Calibration byte is as follows (refer to
for details on Command and Address loading):
1.
A: Load Command “0000 1000”.
2.
B: Load Address Low Byte, 0x00.
3.
Set OE to “0”, and BS1 to “1”. The Calibration byte can now be read at DATA.
4.
Set OE to “1”.
25.8.15
Parallel Programming Characteristics
Figure 25-7. Parallel Programming Timing, Including some General Timing Requirements
Lock Bits
0
1
BS2
Fuse High Byte
0
1
BS1
DATA
Fuse Low Byte
0
1
BS2
Extended Fuse Byte
Data & Contol
(DATA, XA0/1, BS1, BS2)
XTAL1
t
XHXL
t
WLWH
t
DVXH
t
XLDX
t
PLWL
t
WLRH
WR
RDY/BSY
PAGEL
t
PHPL
t
PLBX
t
BVPH
t
XLWL
t
WLBX
t
BVWL
WLRL







































































