





























AS64 series AC servo drive Function codes
-93-
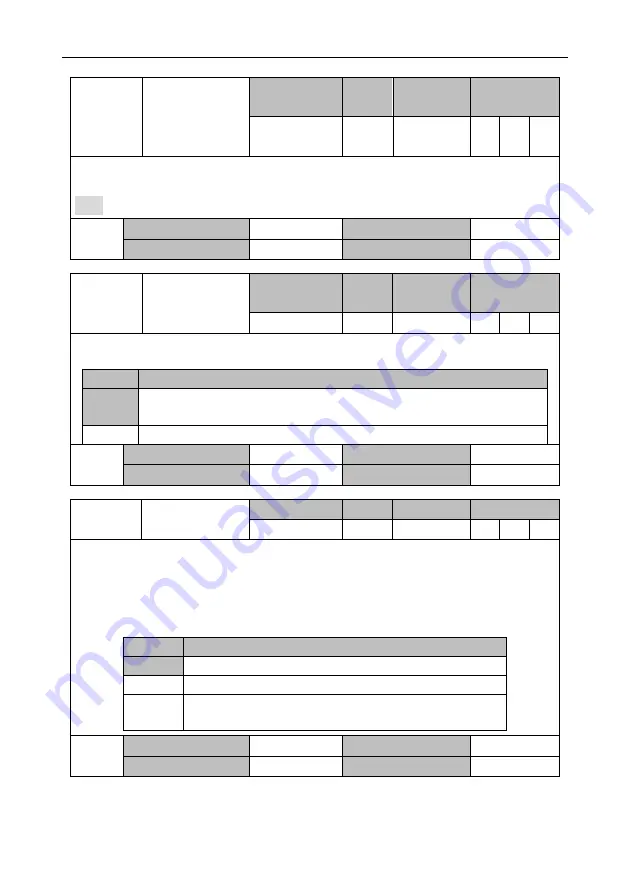
P0.36
Software limit in
CW position control
Setting range
Default
Unit
Applicable
mode
-(2
31
-1)–(2
31
-1)
0
reference
unit
P
This parameter specifies the software limit in CW position control.
If P0.35 is 0 and P0.36 is 0, software limit is invalid.
Note:
The software limit function is valid only when this parameter is less than P0.35.
P0.36
Data size
32bit
Data format
DEC
Modbus address
1072, 1073
CANopen address
0x2024, 0x00
P0.37
Position command
mode
Setting range
Default
Unit
Applicable
mode
0–1
0
-
P
This parameter specifies the position command mode when P0.20 [Position command source] is
set to 1, and it is invalid in other modes.
Setting
Meaning
[
0
]
Incremental (The position command input is the variation relative to the current
position.)
1
Absolute (The position command input is the target position.)
P0.37
Data size
16bit
Data format
DEC
Modbus address
1074, 1075
CANopen address
0x2025, 0x00
P0.38
Fully-closed loop
enabling
Setting range
Default
Unit
适用模式
0–2
0
-
P
This parameter is used to enable the fully-closed loop function.
When this parameter is set to 2, users can switch between fully-closed loop and semi-closed loop
via the I/O ports whose function code is 0x34 or 0x134.
Note: When this parameter is set to 1 or 2, its definition differs from that of electronic gear ratio
during fully-closed loop operation, see details in section 7.2.1.
Setting
Fully-closed loop enabling
[
0
]
Enable
1
Fully-closed loop enable
2
Enable switching between fully-closed loop and semi-closed
loop
P0.38
Data size
16bit
Data format
DEC
Modbus address
1076, 1077
CANopen address
0x2026, 0x00







































































