




























Refitting the track covers
Use this procedure to refit the track cover.
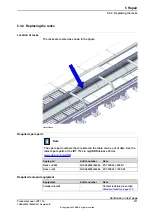
Refitting the track cover
Note
Action
xx2200000616
Refit the cover and secure with the screws.
1
Screws: ISO 7380-2 M6x12 Class 10.9 (4
pcs)
Tightening torque: 8 Nm
Concluding procedure
Note
Action
DANGER
Make sure all safety requirements are met when
performing the first test run. See
may cause injury or damage on page 29
1
262
Product manual - IRT 710
3HKA00000186299-001 Revision: B
© Copyright 2023 ABB. All rights reserved.
5 Repair
5.3.1.1 Replacing the track covers
Continued
Summary of Contents for IRT 710
Page 1: ...ROBOTICS Product manual IRT 710 ...
Page 14: ...This page is intentionally left blank ...
Page 58: ...This page is intentionally left blank ...
Page 84: ...This page is intentionally left blank ...
Page 360: ...This page is intentionally left blank ...
Page 364: ...This page is intentionally left blank ...
Page 378: ...This page is intentionally left blank ...
Page 380: ...This page is intentionally left blank ...
Page 383: ......







































































