




























AEMZP0BA - EPS-AC0 - User Manual
Page - 49/95
11 SETTING THE EPS-AC0
11.1 Complete set-up description
This procedure shall be executed on the prototype after the installation procedure is
completed (see topic 10). The complete set-up changes vs. the truck configuration.
Seek your own configuration below:
11.1.1 Stepper Motor only
Step1
Set the SET SAT FREQ adjustment to the corner frequency of the steering
motor (see 12.4.2.7).
Step2
Set OVERSAT FREQ adjustment in order the sum between SET SAT
FREQ and OVERSAT FREQ gives the wished maximum steering motor
speed (see 12.4.2.8).
Step3
Set the NO LOAD CURRENT adjustments to the current the motor drains
when lightened at the maximum flux (see 12.4.2.10).
Step4
Set the steer sensitivity with the SPEED LIMIT and SENSITIVITY
parameters (see 12.4.4.1-2).
Step5
Set AUTO REQ TYPE in the set model menu to level 0 (no automatic
function). (See 12.4.3.2).
Step6
(CAN Bused system only). Set the Dynamic Numbness in open loop
(steering sensitivity reduces when the truck speed increases). Use
parameters AUX FUNCTION#2 and AUX FUNCTION #3 (see 12.4.4.5-4).
Step7
(No CAN Bused system only). Connect a traction travel demand to CNA#1.
It can be a tiller switch (or a dead-man or a seat switch). This operation
supplies the information the truck is moving or not to stand-by the steer
when the truck is standing.
11.1.2 Stepper Motor & AUTC
When the AUTC is required, it is necessary to carry out all the Steps in paragraph
11.1.1 together with the following:
Step1
When the autocentering (AUTC) is required, it is necessary to contact a
Zapi technician to decide the physical and the superior protocol layers for
the AUTC demanding. (AUTC is a customized function that the eps-ac0
does not execute in its standard version).
One possible arrangement for the AUTC request could be a via CAN bus
demanded centering.
Step2
Turn the truck in the automatic centering mode, drive the truck and roll up
and down the adjustment SET STEER 0-POS until the truck is straight
travelling.
Step3
Set the parameters KP, POS. ACCURACY, LEAD FB REGULAT and LAG
FB REGULAT to avoid overshoot or damping during the centering operation
(see paragraph 12.4.4).
11.1.3 RTC (Twin Pot) only
Step1
Set the SET SAT FREQ adjustment to the corner frequency of the steering
motor (see 12.4.2.7).
Step2
Set OVERSAT FREQ adjustment in order the sum between SET SAT
FREQ and OVERSAT FREQ gives the wished maximum steering motor
speed (see 12.4.2.8).
Содержание EPS-AC0
Страница 23: ...AEMZP0BA EPS AC0 User Manual Page 23 95 6 2 EPS AC0 Stepper Motor diagram Figure 6 2...
Страница 24: ...Page 24 95 AEMZP0BA EPS AC0 User Manual 6 3 EPS AC0 Twin pot diagram Figure 6 3...
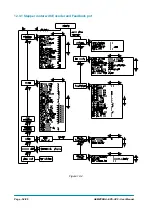
Страница 54: ...Page 54 95 AEMZP0BA EPS AC0 User Manual 12 3 1 Stepper motor with Encoder and Feedback pot Figure 12 2...
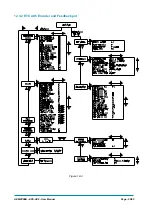
Страница 55: ...AEMZP0BA EPS AC0 User Manual Page 55 95 12 3 2 RTC with Encoder and Feedback pot Figure 12 3...
Страница 56: ...Page 56 95 AEMZP0BA EPS AC0 User Manual 12 3 3 Stepper motor with Encoder and Toggle switch es Figure 12 4...