





























Sigma II User’s Manual
Chapter 8: Ratings and Characteristics
8 - 41
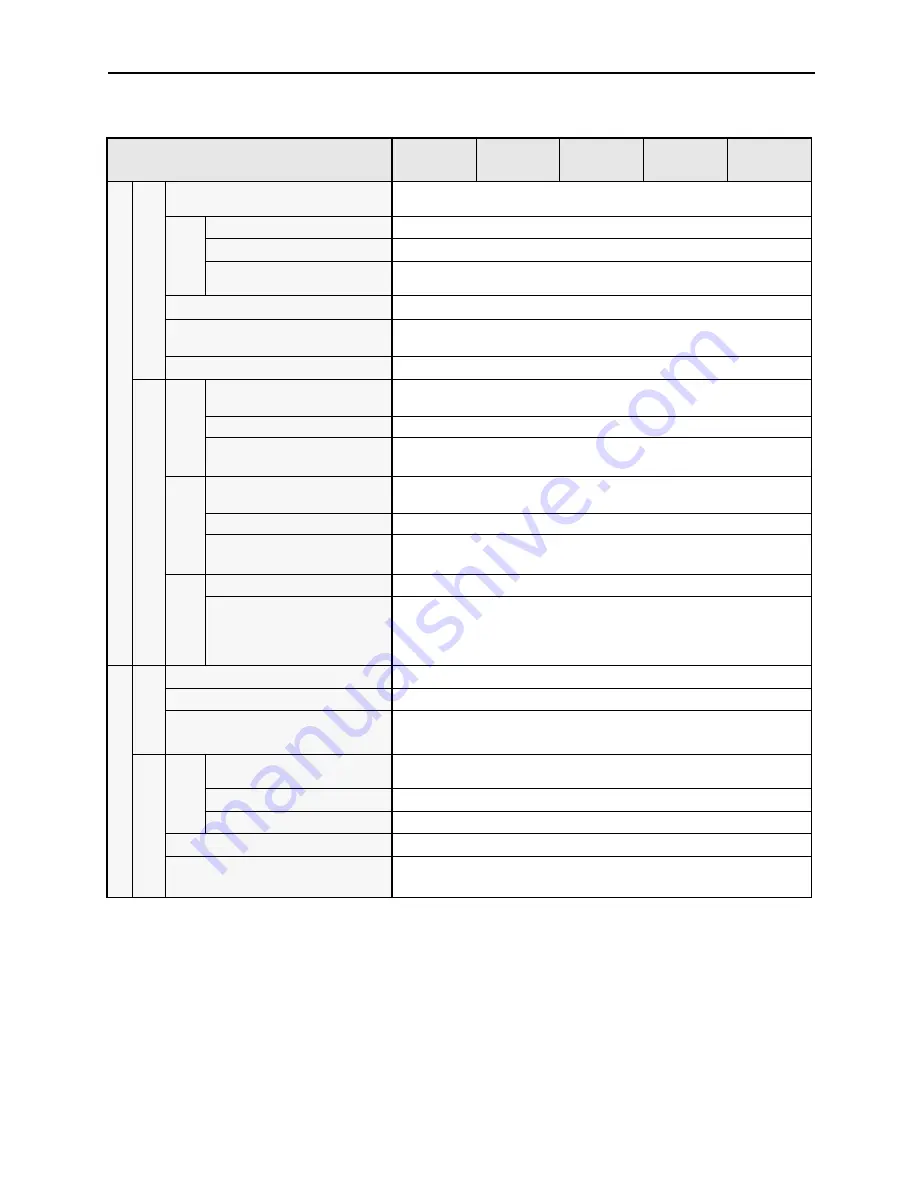
Servo Amplifier Ratings and Specifications Table 2 (continued)
Note:
*1
Speed regulation is defined as follows:
The motor speed may change due to voltage variations or amplifier drift and changes in
processing resistance due to temperature variation. The ratio of speed changes to the rated speed
represents speed regulation due to voltage and temperature variations.
*2
Forward is clockwise viewed from the non-load side of the servomotor, (counterclockwise
viewed from the load and shaft end).
*3
The built-in open collector power supply is not electrically isolated from the control circuit in the
servo amplifier.
Servo Amplifier Model
SGDH-
50
60
75
1A
1E
Sp
eed
and
Torqu
e Cont
rol M
odes
Perform
anc
e
Speed Control Range
1:5000 (The lowest speed of the speed control range is the point just before the
motor stops under full-load condition.)
Spee
d
Regulation
*1
Load Regulation
0 to 100% load: 0.01% maximum (at rated speed)
Voltage Regulation
Rated Voltage ±10%: 0% (at rated speed)
Temperature Regulation
25 ± 25°C: ±0.1% max. (at rated speed)
Frequency Characteristics
400Hz (at J
L =
J
M
)
Torque Control Tolerance
(Repeatability)
±2%
Soft Start Time Setting
0 to 10s (Can be set individually for acceleration and deceleration)
Inpu
t Sign
als
Speed
Re
feren
ce I
nput
Reference Voltage
*2
±6V
DC
(Variable setting range: ±2 to ±10V
DC
) at rated torque (positive torque
reference with positive reference), input voltage: ±12V (maximum).
Input Impedance
About 14k
Ω
Circuit Time Constant
—
Torque
Refe
renc
e Inp
ut
Reference Voltage
*2
±3V
DC
(Variable setting range: ±1 to ±10V
DC
) at rated torque (positive torque
reference with positive reference), input voltage: ±12V (maximum)
Input Impedance
About 14k
Ω
Circuit Time Constant
About 47µs
Conta
ct Sp
eed
Re
fer
en
ce
Rotation Direction Selection
With P control signal
(/P-CON)
Speed Selection
With forward/reverse current limit signal (speed 1 to 3 selection), servomotor stops
or another control method is used when both are OFF.
Position Control Mode
Pe
rformance
Bias Setting
0 to 450rpm (setting resolution: 1rpm)
Feed Forward Compensation
0 to 100% (setting resolution: 1%)
Positioning Completed Width Setting
0 to 250 reference units (setting resolution: 1 reference unit)
In
put Si
gna
ls
Ref
erenc
e
Pulse
Type
Sign + pulse train, 90° phase difference 2-phase pulse (A phase + B phase), or
CCW + CW pulse train
Form
Line driver (+5V level), open collector (+5V or +12V level)
Frequency
500/200kpps maximum (line driver/open collector).
Control Signal
Clear Signal (input pulse form identical to reference pulse)
Built-in Open Collector Power
Supply
*3
+12V (1k
Ω
built-in resistor)
Содержание SGMAH
Страница 1: ...Sigma II Series Servo System User s Manual...
Страница 2: ......
Страница 4: ...ii This page intentionally left blank...
Страница 6: ...iv This page intentionally left blank...
Страница 10: ...Sigma II User s Manual Table of Contents Preface viii Notes...
Страница 17: ...Sigma II User s Manual Table of Contents Preface xv C 6 Torque Control Mode C 9...
Страница 18: ...Sigma II User s Manual Table of Contents Preface xvi...
Страница 38: ...Sigma II User s Manual Chapter 2 Installation 2 10 NOTES...
Страница 472: ...Sigma II User s Manual Appendix C Examples of Standard Connections C 10 Notes...
Страница 487: ......







































































