




























S5-95F
Blocks and Their Functions
At instant t
k
, manipulated variable Y
k
is computed as follows:
m=k
Yk=
dYm
m=0
Initializing the
PID Algorithm
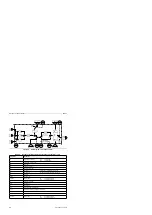
OB251's interface to its environment is the controller DB.
All data needed to compute the next manipulated variable value is stored in this DB. Each controller
must have its own controller data block.
The controller-specific data are initialized in a data block that must comprise at least 49 data words.
The CPU goes to STOP with a transfer error (TRAF) if no DB has been opened or if the DB is too
short.
!
Caution
Make sure that the right controller DB has been opened before calling control algorithm
OB251.
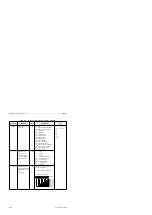
Table 9-5. Format of the Controller DB
1
It is possible to have larger gains, if sudden incremental changes to the system deviation are small enough. This is the
reason you have to divide larger deviations into smaller ones such as adding the setpoint via a ramp function.
Data Word
Name
Comments
1
3
5
7
9
K
R
TI
TD
W
Proportional gain (-32 768 to + 32 767) for controllers without a
differential comp.
Proportional gain (- 1500 to +1500) for controllers with a diff.
comp.
1
K is greater than zero when the control is direct acting, and less
than zero when the control is reverse acting; the specified value is
multiplied by a factor of 0.001.
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
Constant TI (0 to 9999)
TI=
The specified value is multiplied by the factor of 0.001.
Constant TD (0 to 999)
TD=
Derivative-action time TV
Sampling interval TA
Setpoint (- 2047 to+2047)
R parameter (- 32 768 to+32 767) for controllers w/o a diff. comp.
R parameter (- 1500 to+1500) for controllers with a diff. comp.1
Normally 1 for controllers with P component; the specified value is
multiplied by the approximate factor of 0.001
Sampling interval TA
Integral-action time TN
EWA 4NEB 812 6210-02
9-7







































































