Product description
22
© SICK AG · Germany · All rights reserved · Subject to change without
notice
8016535/1D2F/2022-11-14
Operating instructions
NAV310 Laser positioning sensor
Chapter
3
3.6
Output of measured values
The measured values can be transmitted to a computer system connected and evaluated
here (see
section 3.7.2 “Data communication using telegrams” on page 23
). The host can
calculate the position of the AGV from these measured values.
Navigation based on the surrounding contour measured is useful in places in which it is not
possible to attach any reflectors, for example in truck cargo bays.
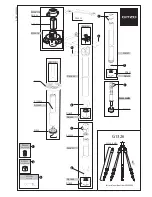
Fig. 8:
Output of measured values for truck loading
The NAV310 outputs the following measured values at its data interfaces:
•
profile of the field of view in two-dimensional polar coordinates as hex values
•
contents of one revolution (360°): incl. number of the profile emitted, profile counter,
sector numbers, step width, number of points per sector, time stamp for start/end of
each sector, direction at the start/end of each sector, value and direction of the distanc-
es measured, status
Important
It is only possible to output all measured values of a 360° scan in real-time using the Ether-
net interface.
3.7
Integration of the NAV310 in an AGV’s control system
Recommendation
The integration of an NAV310 in an AGV’s control system requires sound programming skills
in the area of vehicle control. In addition knowledge of the data exchange between a laser
positioning sensor such as the NAV310 and the vehicle computer are required.
3.7.1
Data interfaces
The NAV310 has a serial host interface and an Ethernet interface. The NAV310 is config-
ured with the aid of SOPAS ET via these interfaces. The NAV310 also communicates with
the AGV’s vehicle computer via its interfaces.