

















User Manual
176
User Manual
177
If it is a P group parameter, to realize this function, it can be realized by
changing the high bit F of the function code address to 0.
Besides, due to EEPROM be frequently stored, it will reduce the lifetime of
EEPROM. In the communication mode, and some function codes don’t have
to be stored as long as change the RAM value.
For example, the function code P3-12 is not stored in the EEPROM, the
address is expressed as 0x030C; the function code A0-05 is not stored in the
EEPROM, the address is represented as 0x4005; the address indicates that
only the RAM can be written, the read operation cannot be performed, read
When it is an invalid address. For all parameters, you can also use command
code 07 to implement this function.
If it is a group A parameter, to achieve this function, just change the high bit
A of the function code address to 4; the corresponding function code address
is expressed as follows: high byte: 00~0F (P group), 40~4F ( Group A) Low
byte: 00~FF
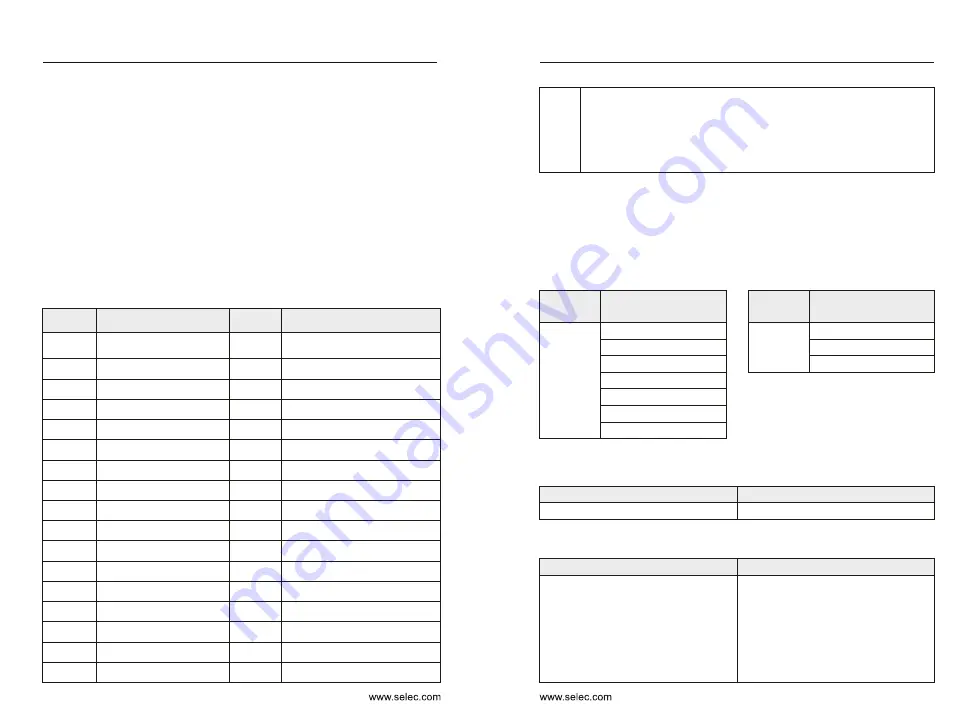
Parameter
address
Parameter description
4097
Communication set value
(-10000 ~ 10000)(Decimal)
4114
PID feedback
4098
Running frequency
4115
PLC process
4099
DC Bus voltage
4116
Pulse input frequency, unit: 0.01KHz
4100
Output voltage
4117
Feedback speed
4101
Output current
4118
Remaining running time
4102
Output power
4119
Voltage before AI1 correction
4103
Output torque
4120
Voltage before AI2 correction
4104
Running speed
4121
Voltage before AI3 correction
4105
X input terminal
4122
Linear speed
4106
DO output terminal
4123
Present power-on time
4107
AI1 voltage
4124
Present running time
4108
AI2 voltage
4125
Pulse input frequency, unit:1Hz
4109
AI3 voltage
4126
Communication setting value
4110
Counting value input
4127
Actual feedback speed
4111
Length value input
4128
Main frequency X display
4112
Load speed
4129
Auxiliary frequency Y display
4113
PID setting
Parameter
address
Parameter description
Note
•
With regard to frequency, communication reference is a percentage of
P0-10 (maximum frequency).
•
Communication setting value indicates percentage: 10000 corresponds
to 100.00%, and -10000 corresponds to -100.00%.
•
With regard to torque, communication reference is a percentage of P2-
10 and A2-48 (corresponding to motor 1 and motor 2, respectively).
Stop/start parameter
Note:
Communication setting value is the percentage of relative value, 10000
corresponds to 100%, -10000 correspond to -100.00%.
Control command input
frequency inverter: (write in only)
Command
word
address
Command function
8193
0001: Forward running
0002: Reverse running
0003: Forward jog
0004: Reverse jog
0005: Free stop
0006: Decelarating stop
0007: Fault reset
Read inverter status:
(read only)
Command
word
address
Command function
12289
0001: Forward running
0002: Reverse running
0003: Stop
Parameter locking password collation :
(If the feedback is the 8888H,
it indicates the password collation passed)
Password address
Contents of input password
1F00H
*****
Digital output terminal control:
(write in only)
Address of locking password command Contents of locking password command
8194
BIT0: DO1 output control
BIT1: DO2 output control
BIT2: Relay 1 output control
BIT3: Relay 2 output control
BIT4: FMR output control
BIT5:VDO1
BIT6:VDO2
BIT7:VDO3
BIT8:VDO4
Chapter 9
Chapter 9







































































