






















App. - 1
APPENDIX
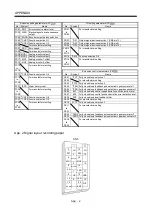
App. 1 Parameter list
POINT
Parameter whose symbol is preceded by * is made valid with the following
conditions.
* : Set the parameter value, switch power off once after setting, and then switch
it on again, or perform the controller reset.
**: Set the parameter value, switch power off once, and then switch it on again.
Basic setting parameters (PA
) Gain/filter
parameters
(PB
)
No. Symbol
Name
No. Symbol
Name
PA01 **STY Control mode
PB01
FILT
Adaptive tuning mode (Adaptive filter )
PA02 **REG Regenerative
option
PA03
*ABS Absolute position detection system
PB02
VRFT
Vibration suppression control filter tuning mode
(Advanced vibration suppression control)
PA04 *AOP1 Function selection A-1
PB03
For manufacturer setting
For manufacturer setting
PB04
FFC
Feed forward gain
PB05
For manufacturer setting
PA05
to
PA07
For manufacturer setting Ratio of load inertia
PA08 ATU Auto
tuning
PB06
GD2
moment to servo motor inertia moment
PA09
RSP
Auto tuning response
PB07
PG1
Model loop gain
PA10
INP
In-position range
PB08
PG2
Position loop gain
PA11
For manufacturer setting
PB09
VG2
Speed loop gain
to
PB10
VIC
Speed
integral
compensation
PA13
PB11
VDC
Speed
differential
compensation
PA14
*POL Rotation direction selection
PB12
For manufacturer setting
PA15 *ENR Encoder output pulses
PB13
NH1
Machine resonance suppression filter 1
PA16 *ENR2 Encoder output pulses
PB14
NHQ1 Notch form selection 1
PA17
For manufacturer setting
PB15
NH2
Machine resonance suppression filter 2
PA18
PB16
NHQ2 Notch form selection 2
PA19
*BLK Parameter write inhibit
PB17
Automatic setting parameter
PB18
LPF
Low-pass
filter
PB19
VRF1
Vibration suppression control vibration frequency
setting
PB20
VRF2
Vibration suppression control resonance frequency
setting
PB21
PB22
For manufacturer setting
PB23
VFBF
Low-pass
filter
selection
PB24
*MVS Slight vibration suppression control selection
PB25
For manufacturer setting
PB26
*CDP
Gain
changing
selection
PB27
CDL
Gain
changing
condition
PB28
CDT
Gain changing time constant
PB29
GD2B
Gain changing ratio of load inertia moment to servo
motor inertia moment
PB30
PG2B Gain changing position loop gain
PB31
VG2B Gain changing speed loop gain
PB32
VICB Gain changing speed integral compensation
PB33 VRF1B
Gain changing vibration suppression control
vibration frequency setting
PB34 VRF2B
Gain changing vibration suppression control
resonance frequency setting
PB35
to
PB45
For manufacturer setting
Содержание MR-J3-B-RJ006
Страница 15: ...A 14 MEMO ...
Страница 19: ...4 MEMO ...
Страница 65: ...2 18 2 SIGNALS AND WIRING MEMO ...
Страница 119: ...4 22 4 OPERATION AND FUNCTIONS MEMO ...
Страница 145: ...6 6 6 TROUBLESHOOTING MEMO ...
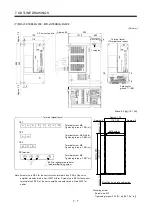
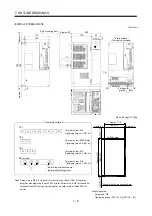
Страница 155: ...7 10 7 OUTLINE DRAWINGS MEMO ...
Страница 165: ...SH NA 030056 C ...






































































