




























4 - 11
4. OPERATION AND FUNCTIONS
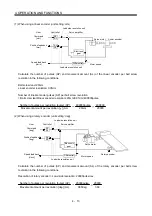
To always make a home position return to the same position, perform the following operation.
Once move the rotary encoder to the stroke end opposite to the home position return direction with the JOG
operation of controller, etc. and then perform a home position return.
Stroke end
Home position
Machine position
Rotary encoder home position
Stroke end
Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Home position
return operation
Machine position
Rotary encoder home position
JOG operation
Home position return enabled area
Home position return disabled area
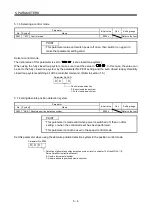
(4) About dog type home position return when using the rotary encoder of a serial communication servo motor
The home position for when using the rotary encoder of a serial communication servo motor for the load
side encoder is at the load side Z-phase position.
Home position
ON
OFF
Load side encoder
Z-phase signal
Home position
reference position
Machine position
Servo amplifier
power-on position
Equivalent to one load side revolution
(5) About data setting type (Common to all load side encoders)
In the data setting type home position return method, pass through a scale home position (reference mark)
and the Z-phase signal of the rotary encoder, and then make a home position return.
When the machine has no distance of one motor encoder revolution until the Z-phase of the rotary encoder
is passed through, a home position return can be made by changing the parameter No.PC17 (home
position setting condition selection) setting if the home position is not yet passed through.
Содержание MR-J3-B-RJ006
Страница 15: ...A 14 MEMO ...
Страница 19: ...4 MEMO ...
Страница 65: ...2 18 2 SIGNALS AND WIRING MEMO ...
Страница 119: ...4 22 4 OPERATION AND FUNCTIONS MEMO ...
Страница 145: ...6 6 6 TROUBLESHOOTING MEMO ...
Страница 155: ...7 10 7 OUTLINE DRAWINGS MEMO ...
Страница 165: ...SH NA 030056 C ...






































































