




























4 - 13
4. OPERATION AND FUNCTIONS
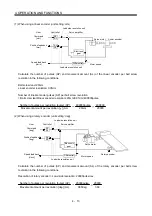
(1) When using a linear encoder (unit setting: mm)
Differential
AP
AL
Servo motor
Linear encoder
Position feedback
[mm]
Command
[mm]
Speed feedback
[r/min]
AL
AP
Electronic
gear
User
Controller
Servo amplifier
Load side resolution unit
Load side resolution unit
Motor speed
Calculate the number of pulses (AP) and movement amount (AL) of the linear encoder per ball screw
revolution in the following conditions.
Ball screw lead: 20mm
Linear encoder resolution: 0.05 m
Number of linear encoder pulses (AP) per ball screw revolution
= Ball screw lead/linear encoder resolution=20mm/0.05 m=400000pulse
400000pulse
20mm
400000
20000
Number of pulses per revolution [pulse] (AP)
Movement amount per revolution [ ] (AL)
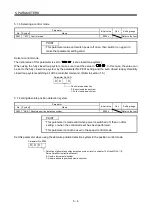
(2) When using a rotary encoder (unit setting: deg)
Servo motor
Rotary encoder
AP
AL
Position feedback
[deg]
Command
[deg]
Speed feedback
[r/min]
AL
AP
Electronic
gear
User
Controller
Servo amplifier
Load side resolution unit
Load side resolution unit
Motor speed
Differential
Calculate the number of pulses (AP) and movement amount (AL) of the rotary encoder per ball screw
revolution in the following conditions.
Resolution of rotary encoder = Load side resolution: 20000pulse/rev
20000pulse
360deg
20000
360
Number of pulses per revolution [pulse] (AP)
Movement amount per revolution [deg] (AL)
Содержание MR-J3-B-RJ006
Страница 15: ...A 14 MEMO ...
Страница 19: ...4 MEMO ...
Страница 65: ...2 18 2 SIGNALS AND WIRING MEMO ...
Страница 119: ...4 22 4 OPERATION AND FUNCTIONS MEMO ...
Страница 145: ...6 6 6 TROUBLESHOOTING MEMO ...
Страница 155: ...7 10 7 OUTLINE DRAWINGS MEMO ...
Страница 165: ...SH NA 030056 C ...







































































