




























3 - 22
3. SIGNALS AND WIRING
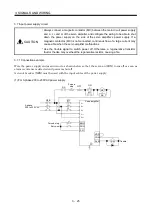
(b) Lamp load
For use of internal power supply
For use of external power supply
Servo amplifier
COM
R
VDD
24VDC
SG
ALM, etc
(Note)
24VDC
10%
Servo amplifier
COM
R
VDD
24VDC
SG
ALM, etc
Do not connect
VDD-COM.
Note. If the voltage drop (maximum of 2.6V) interferes with the
relay operation, apply high voltage (up to 26.4V) from
external source.
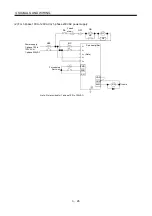
(3) Encoder pulse output DO-2
(a) Open collector system
Interface
Servo amplifier
OP
5 to 24VDC
Photocoupler
SD
Max. output current : 35mA
LG
Servo amplifier
OP
SD
LG
(b) Differential line driver system
1) Interface
Max. output current: 35mA
LA
(LB, LZ)
LAR
(LBR, LZR)
LG
SD
LA
(LB, LZ)
LAR
(LBR, LZR)
SD
Servo amplifier
Servo amplifier
Am26LS32 or equivalent
High-speed photocoupler
150
100
Содержание MR-J2S-10CP
Страница 11: ...A 10 MEMO ...
Страница 19: ...8 MEMO ...
Страница 45: ...1 26 1 FUNCTIONS AND CONFIGURATION MEMO ...
Страница 181: ...6 20 6 MR Configurator SERVO CONFIGURATION SOFTWARE MEMO ...
Страница 207: ...7 26 7 DISPLAY AND OPERATION MEMO ...
Страница 219: ...8 12 8 GENERAL GAIN ADJUSTMENT MEMO ...
Страница 229: ...9 10 9 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Страница 231: ...10 2 10 INSPECTION MEMO ...
Страница 249: ...12 8 12 OUTLINE DIMENSION DRAWINGS MEMO ...
Страница 257: ...13 8 13 CHARACTERISTICS MEMO ...







































































