15 - 34
15. COMMUNICATION FUNCTIONS
(c) Acceleration time constant
Read the acceleration time constant of the point table.
1) Transmission
Transmit command [5][4] and any of data No. [0][1] to [1][F] corresponding to the point table to
be read. Refer to section 15.11.1.
2) Reply
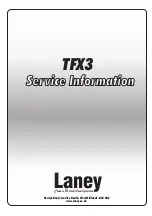
The slave station sends back the acceleration time constant of the requested point table.
0
Hexadecimal data
Display type
0: Used unchanged in hexadecimal
1: Conversion into decimal required
Accelevation time constant write type
0: Valid after write
1: Valid when power is switched on again after write
0
0
(d) Deceleration time constant
Read the deceleration time constant of the point table.
1) Transmission
Transmit command [5][8] and any of data No. [0][1] to [1][F] corresponding to the point table to
be read. Refer to section 15.11.1.
2) Reply
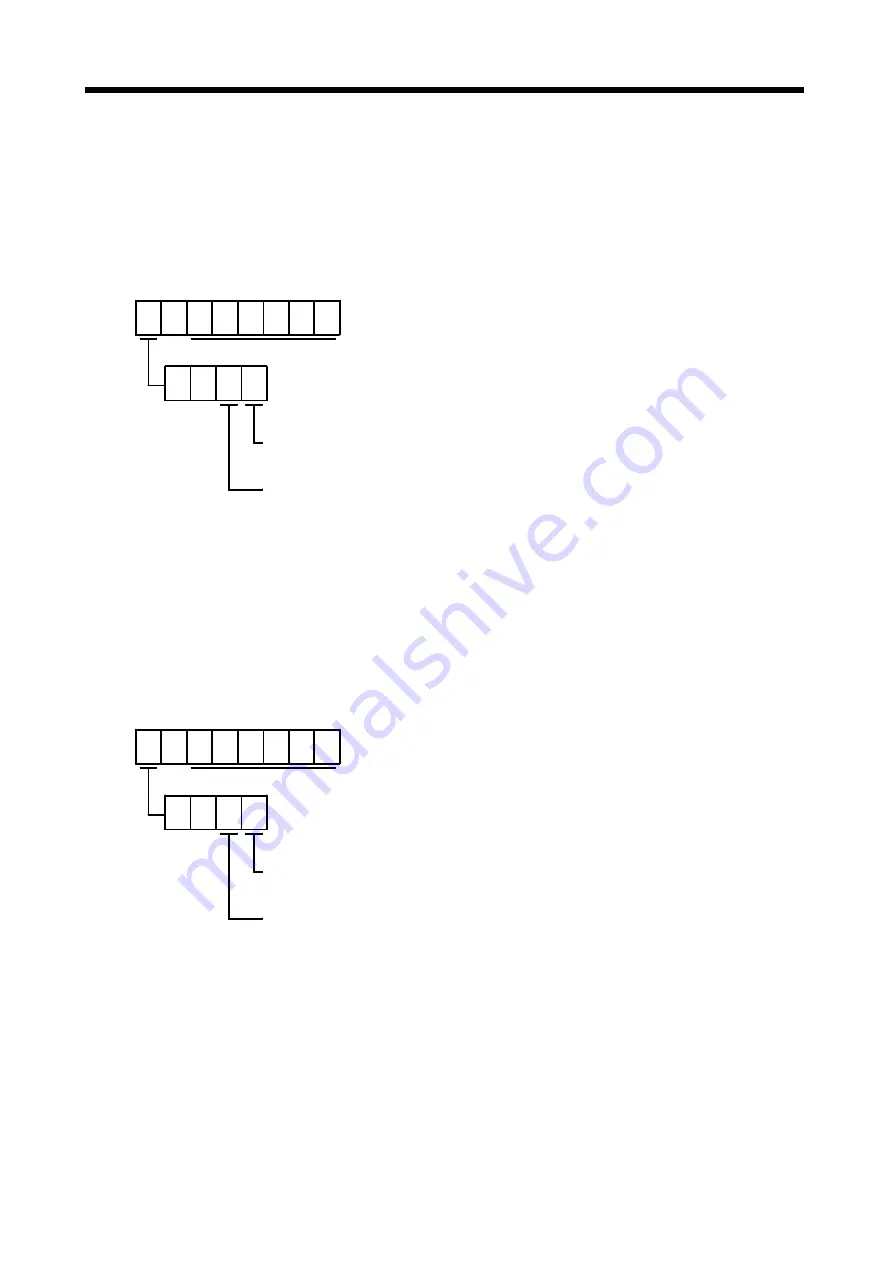
The slave station sends back the deceleration time constant of the requested point table.
0
Hexadecimal data
Display type
0: Used unchanged in hexadecimal
1: Conversion into decimal required
Deceleration time constant write type
0: Valid after write
1: Valid when power is switched on again after write
0
0
Содержание MR-J2S-10CP
Страница 11: ...A 10 MEMO ...
Страница 19: ...8 MEMO ...
Страница 45: ...1 26 1 FUNCTIONS AND CONFIGURATION MEMO ...
Страница 181: ...6 20 6 MR Configurator SERVO CONFIGURATION SOFTWARE MEMO ...
Страница 207: ...7 26 7 DISPLAY AND OPERATION MEMO ...
Страница 219: ...8 12 8 GENERAL GAIN ADJUSTMENT MEMO ...
Страница 229: ...9 10 9 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Страница 231: ...10 2 10 INSPECTION MEMO ...
Страница 249: ...12 8 12 OUTLINE DIMENSION DRAWINGS MEMO ...
Страница 257: ...13 8 13 CHARACTERISTICS MEMO ...