





























6. MODBUS REGISTERS
6 - 10
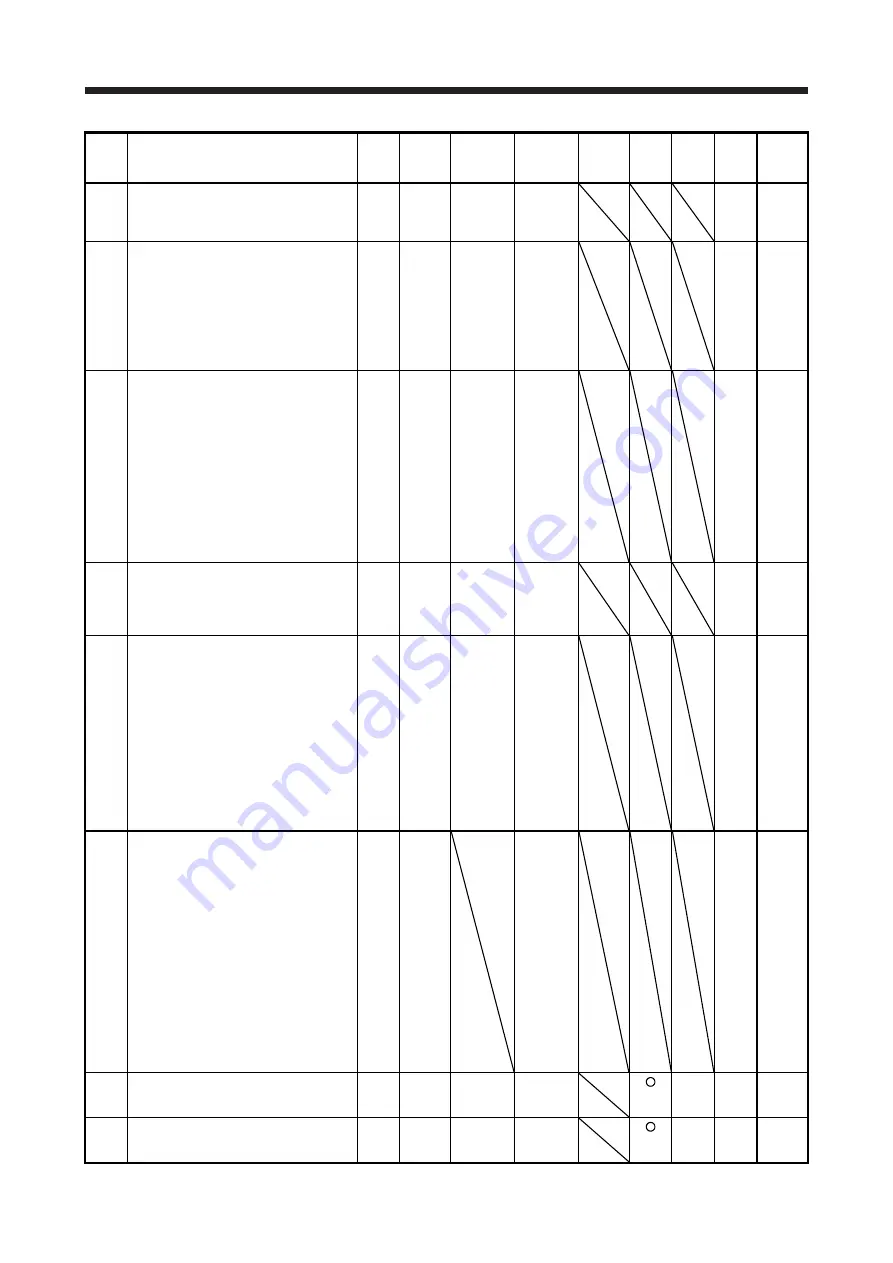
Address
Name and function
Data
type
Read/
write
Initial value
Range
Unit
Saved
to EEP-
ROM
Para-
meter
No. of
Points/
No. of
Registers
Continuous
read/
continuous
write
2D52 Stop of one-touch tuning (One-touch tuning
Stop)
Writing "1EA5h" can stop one-touch tuning. Any
value other than "1EA5h" is ignored.
2
bytes
Writing 0 0000h/
1EA5h
1
Impossible
2D53 Returning parameters changed in one-touch
tuning (One-touch tuning Clear)
The parameter changed in one-touch tuning
can be returned to the value before the change.
The description of the setting values is as
follows.
0000: Restores the default value
0001: Restores the value before one-touch
tuning.
2
bytes
Writing 0 0000h
to
0001h
1
Impossible
2D54 One-touch tuning error code (One-touch tuning
Error Code)
An error code of the one-touch tuning is
returned. The description of the error codes is
as follows.
0000: Finished normally
C000: Tuning canceled
C001: Overshoot exceeded
C002: Servo-off during tuning
C003: Control mode error
C004: Time-out
C005: Load to motor inertia ratio misestimated
C00F: One-touch tuning disabled
2
bytes
Reading 0 0000h
to
C00Fh
1
Impossible
603F Latest error No. display (Error code)
The latest error No. that occurred after the
power on is returned. The error number is as
follows.
1000h: Generic error
2
bytes
Reading 0 0000h
to
FFFFh
1
Impossible
6040 Control command (Controlword)
Set control commands to control the servo
amplifier.
Bit 0: switch on
Bit 1: enable voltage
Bit 2: quick stop
Bit 3: enable operation
Bit 4 to Bit 6: operation mode specific
Bit 7: fault reset
Bit 8: halt
Bit 9: operation mode specific
Bit 10 to Bit 14: reserved
Bit 15: operation mode specific
2
bytes
Read/
write
0 0000h
to
FFFFh
1
Impossible
6041 Control status (Statusword)
The current control status can be checked.
Bit 0: ready to switch on
Bit 1: switched on
Bit 2: operation enabled
Bit 3: fault
Bit 4: voltage enabled
Bit 5: quick stop
Bit 6: switch disabled
Bit 7: warning
Bit 8: reserved
Bit 9: remote
Bit 10: target reached
Bit 11: internal limit active
Bit 12 to Bit 13: operation mode specific
Bit 14 to Bit 15: reserved
2
bytes
Reading 0000h
to
FFFFh
1
Impossible
605A Quick stop option code
The operation method of deceleration to a stop
can be specified.
2
bytes
Read/
write
2 0002h
(fixed)
PT69 1
Impossible
605D Halt option code
Set how to decelerate the servo motor to a
stop at Halt reception.
2
bytes
Read/
write
1 0001h
(fixed)
PT69 1
Impossible
Содержание MELSERVO-JE MR-JE-C
Страница 9: ...A 8 MEMO ...
Страница 83: ...MEMO ...







































































