


















49
23
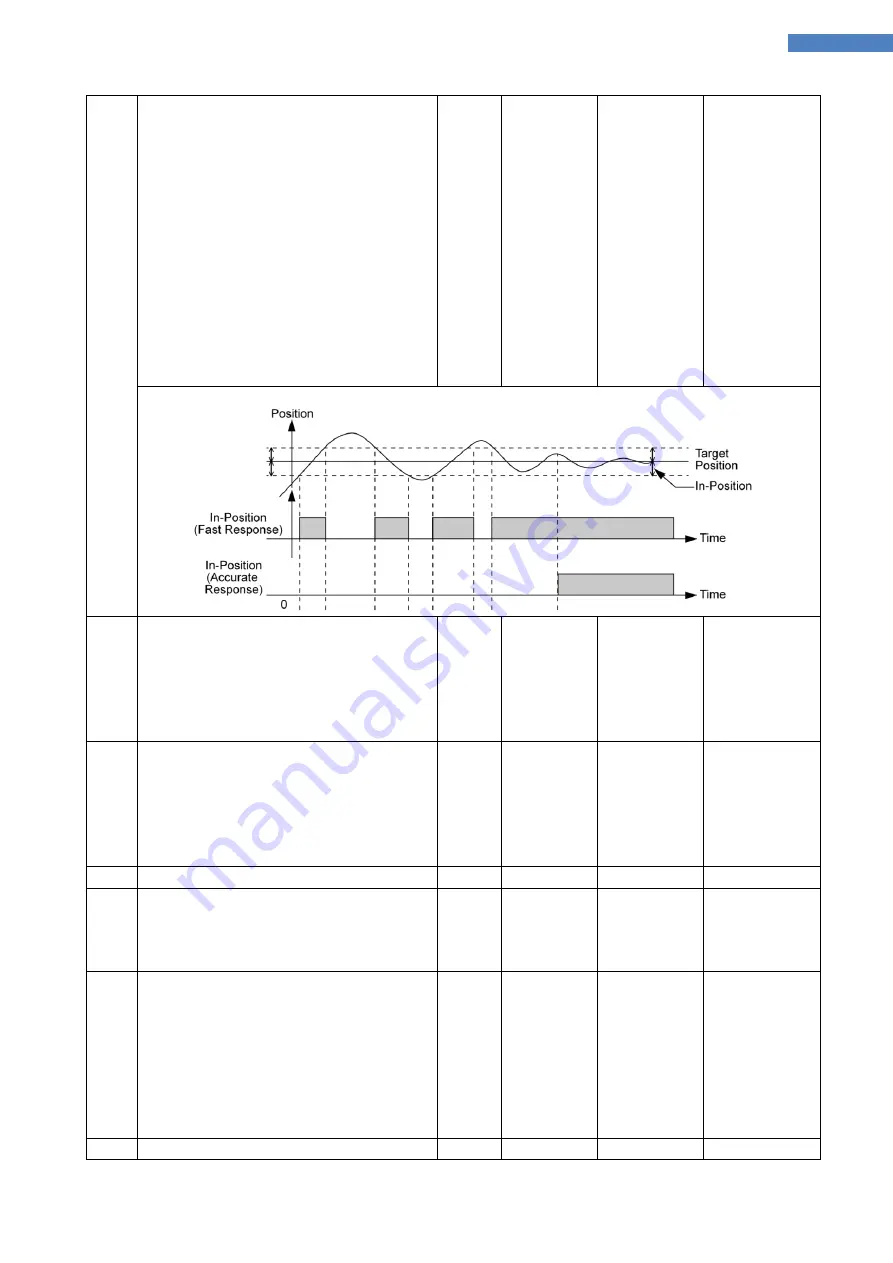
Inpos Value :
Sets the output condition of the
in-position signal. After position
command pulse is finished, when the
position deviation from target position
is within ‘Inpos Value’, this mode
displays in-position finish signal.
The position deviation to output the
In-position is 0~63. According to
control mode set value is as follows:.
1) Fast Response Mode : 0~63
2) Accurate Response Mode : 64~127
According to each mode, the position
deviation range is 0~63.
0
127
3
Fast Response and Accurate Response control method is as below fig.
24
Pos Tracking Limit :
While the motor is run, when ‘Position
Error’ is greater than this setting value,
this mode generates an alarm to stop a
flow of electricity to the motor and
then set it to Servo OFF.
pulse
1
+134,217,7
27
2,500
25
Motion Dir :
When the motor operates by position
command, this mode sets the
revolution direction of the motor.
0 : moves the motor clockwise.
1 : moves the motor counterclockwise.
0
1
0
26
Reserved
-
-
-
-
27
Org Torque Ratio :
In case of ’Origin Method’ parameter
is set to ‘5’ or ‘6’ to set the maximum
torque value to stop the motor.
%
20
90
50
28
Pos. Error Overflow Limit :
Acts to protect the motor and the drive.
While the motor stops and is set to
Servo ON, when ‘Position Error’ is
greater than this setting value, this
mode generates an alarm to stop a flow
of electricity to the motor and then set
it to Servo OFF.
pulse
1
+134,217,7
27
2,500
29
Reserved
-
-
-
-







































































