





























7 Additional settings
7.6.3.4
Necessary error reactions in the case of linear motors
The window
Error/Error management
can be used to define the reactions of the servo drive
to various operating states. In the case of linear motors, a particularly "sharp" reaction
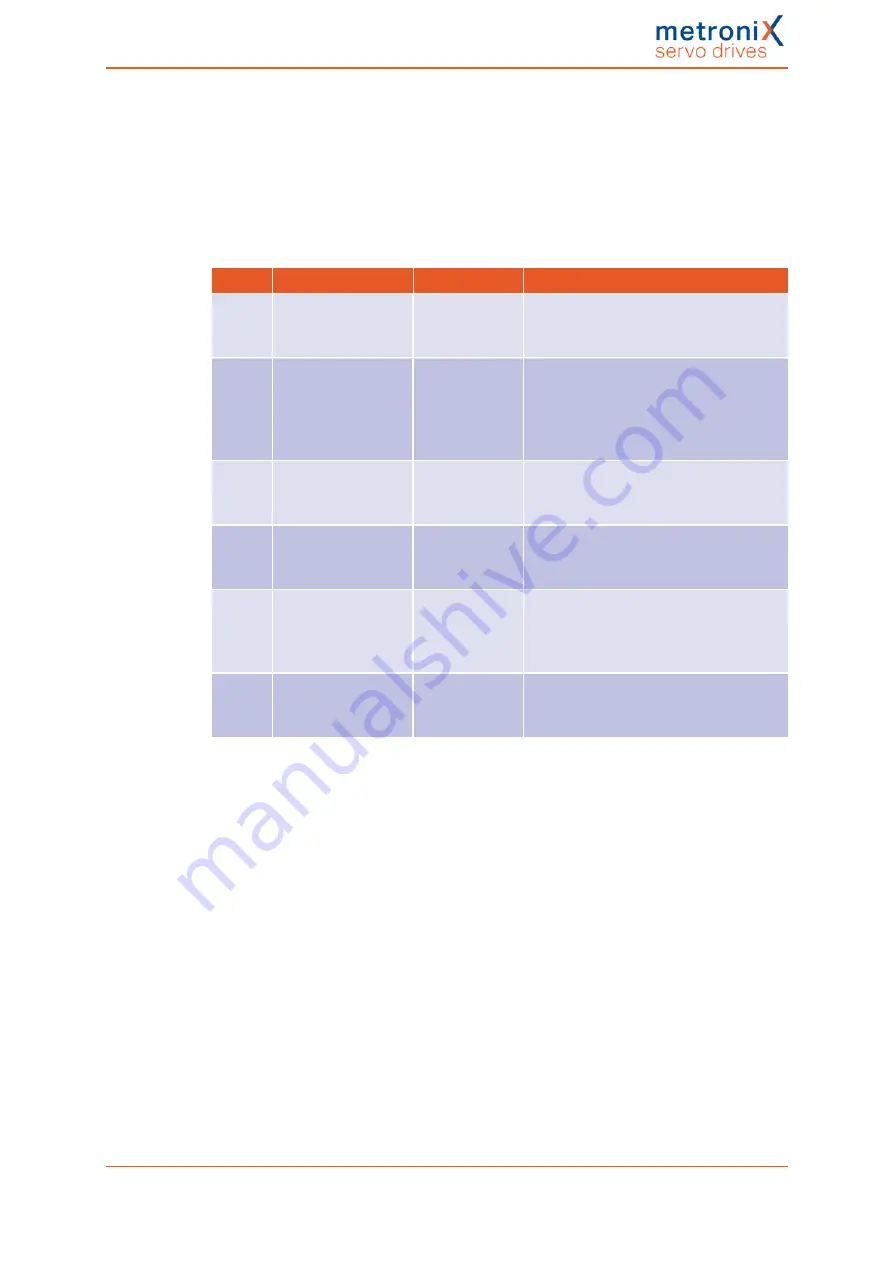
must be parameterised for some events:
The following error settings must be realised or verified prior to using the linear motor for
the first time:
No.
Error
Reaction
Note
03-x
Motor
overtemperature
(analogue or digital)
Disable servo
drive
08-x
Angle encoder error
Stop at
maximum
current
If this error occurs, the encoder system,
its supply line and the setting must be
checked:
Parameters/Device
parameters/Angle encoder
, tab:
X2B /
X6
.
17-0
Max. following error
exceeded
Stop at
maximum
current
To perform the setting, open the menu
Parameters/Safety parameters
27-0
Following error
warning threshold
Stop at
maximum
current
To perform the setting, open the menu
Parameters/Signals
and select the tab
Following error
.
31-x
I²t check of the
motor, servo drive,
PFC and braking
resistor
Stop at
maximum
current
To perform the setting, open the menu
Parameters/Device parameters/Motor
data
.
35-0
Overspeed
protection of linear
motor
Stop at
maximum
current
To perform the setting, open the menu
Parameters/Safety parameters
Product manual BL 4000-C
Page 161 of 298
Содержание smartServo BL 4000-C Series
Страница 1: ...Important Read thoroughly before use Retain for future reference Product manual smartServo BL 4000 C ...
Страница 261: ...15 Appendix 15 2 CE conformity in accordance with the Machinery Directive Product manual BL 4000 C Page 261 of 298 ...
Страница 262: ...15 Appendix Product manual BL 4000 C Page 262 of 298 ...
Страница 263: ...15 Appendix 15 3 cULus certification Product manual BL 4000 C Page 263 of 298 ...







































































