





























6 Applications
The movement to the target position and the homing run can be started by way of
Metronix ServoCommander
®
:
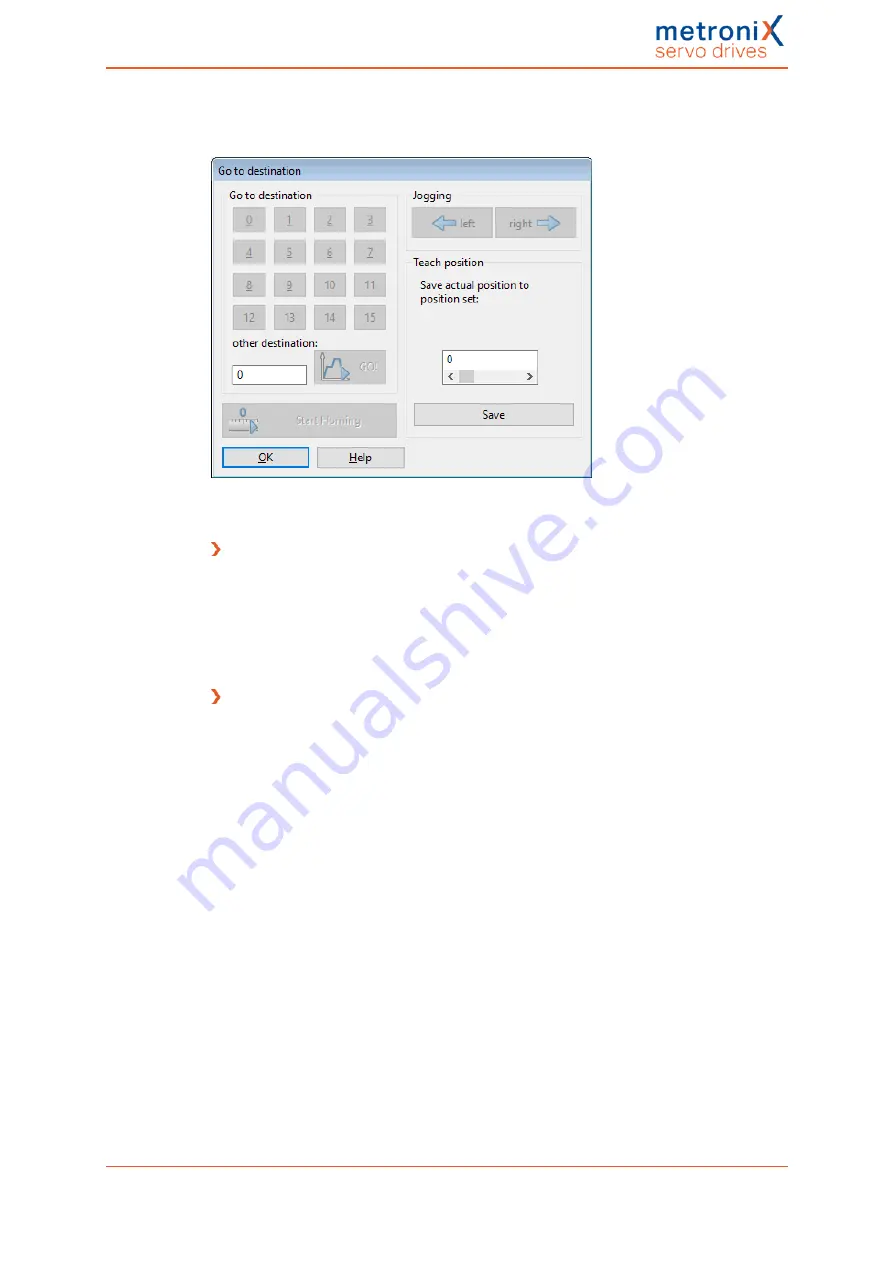
Figure 53: "Go to destination" window
Go to destination
l
Destination 0 to 15
: Click the button to move to the associated position.
l
Other destination
: Enter the position number and click the
GO!
button to move to
the corresponding position.
l
Start homing
: Click the button to start the homing run.
Jog mode
These buttons (left and right) can be used to move the drive. The drive stops when the
buttons are released. This function is useful during the start-up process when the drive
needs to be moved manually in a position-controlled manner.
Save actual position to position set:
Here, the current actual position can be stored in a
position set as the position setpoint.
Product manual BL 4000-C
Page 96 of 298
Содержание smartServo BL 4000-C Series
Страница 1: ...Important Read thoroughly before use Retain for future reference Product manual smartServo BL 4000 C ...
Страница 261: ...15 Appendix 15 2 CE conformity in accordance with the Machinery Directive Product manual BL 4000 C Page 261 of 298 ...
Страница 262: ...15 Appendix Product manual BL 4000 C Page 262 of 298 ...
Страница 263: ...15 Appendix 15 3 cULus certification Product manual BL 4000 C Page 263 of 298 ...