





























Chapter 3- Functionalities
24
XtrapulsCD1-pm - User manual
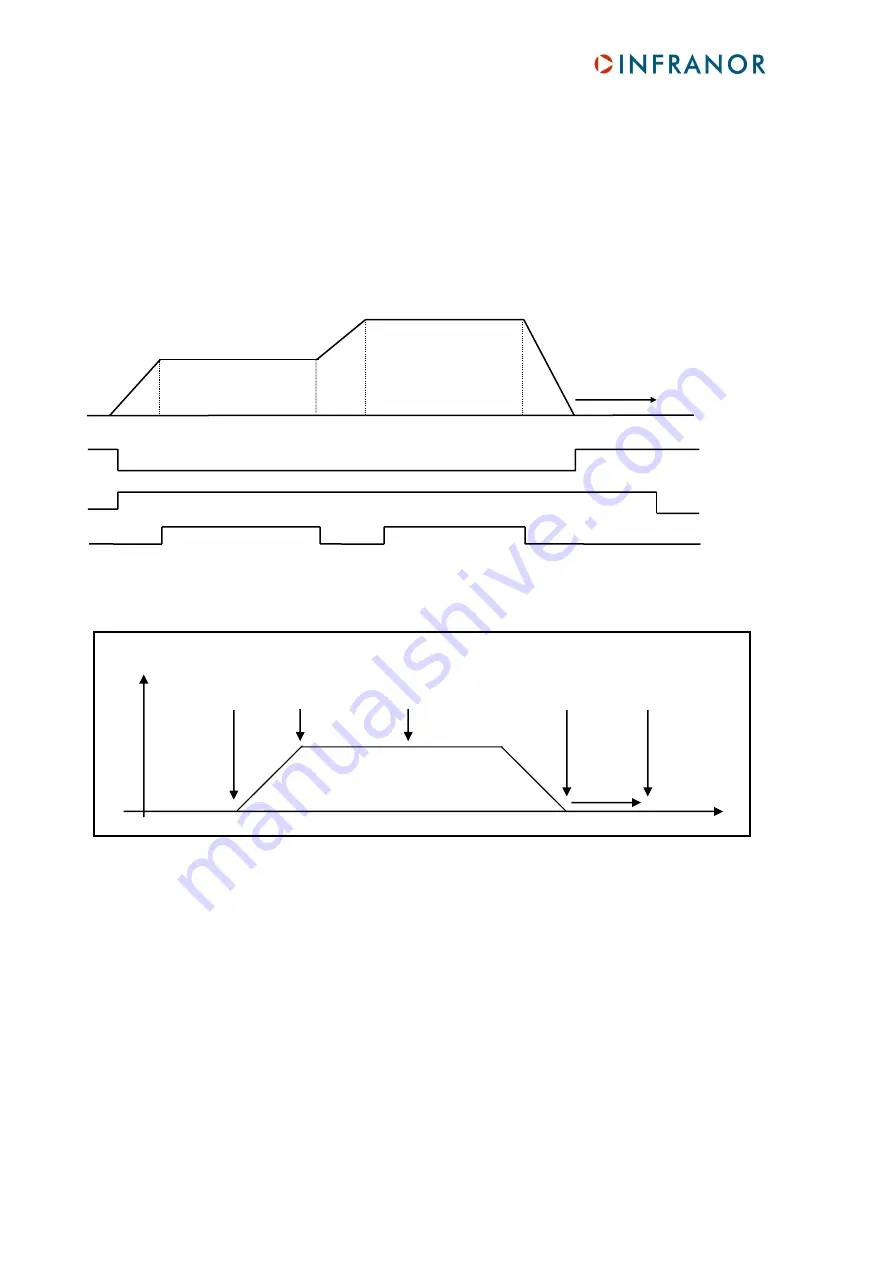
1.2.2 - SEQUENCE CONTROLLED LOGIC OUTPUTS
SEQ
This signal indicates that a sequence is presently executed.
POS
This signal is activated when the motor reaches the position and remains enabled until the
next motor movement.
SPEED
This signal indicates that the speed set point is reached during a movement of the motor.
OUT1 to OUT4
Programmable logic outputs. These outputs are only operating during a programmed
sequence.
Programmable status: "High" status - "Low" status - "Toggle" status.
Various triggering types:
BEGIN
,
SPEED
,
POS
,
HOLD
,
END
.
These outputs can be triggered only once per programmed sequence.
2 - LIMIT SWITCHES ADJUSTMENT
The limit switch inputs are inputs for a proximity sensor that stops the motor with maximum deceleration. When
both limit switches are correctly placed on the motor travel, they are a protection for the machine in case of
incorrect movement.
The limit switches are only defined according to the physical motor rotation. They are not depending on the
selected "rotation/counting direction".
BEGIN
:
Sequence
begin
SPEED
:
Speed
reached
POS
:
Pre-defined
position
reached
HOLD
:
Arrival at
reference
position
END
:
Sequence
over
t
Sequence 1 with
Tdec = 0 and Next = 2
Sequence 2
Delay time
POS
SEQ
SPEED







































































