



























49
• Both Heating and Cooling Output can be
calculated by PID For both Heating/Cooling, the
controller may use either PID Control or ON/OFF
Control. If the Proportional Band of the Heating (P) is
set to 0, the Control Output is ON/OFF. If the
Proportional Band of the Cooling (Pc) is set to 0, the
Control Output is ON/OFF. Also, Relay Output, Voltage
Pulse Output and Current Output are available.
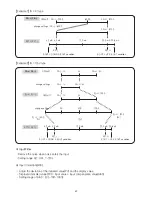
•In Heating/Cooling Control, the Dead Band can be
set from 100 to 50%. The Dead Band of ON/OFF
Control is shown in Fig. 2-3
•The Dead Band of PID Control is shown in Fig. 2-4 below.
The –SV Dead Band in PID Control (for both Heating and Cooling) is shown in Fig. 2.5.
In this case, the Heating Output and Cooling Output meet at particular point.
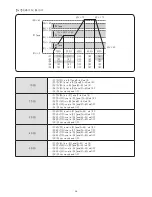
4) Heating/Cooling Control
5) PID Control (Heating/Cooling Control)
• PID Select
PID is selected and calculated by the condition 1 and 2 below:
① Output (MV) › 50 % + 0.25%: Select the PID for Heating.
② Output (MV) ‹ 50 % –0.25%: Select the PID for Cooling.
In other conditions, the setting remains unchanged.
③ For the first PID calculation, the Output is to set 50 %, and the PID for Heating is used (if P≠0, Pc≠0).
In the Manual Control Mode, the Heating/Cooling Output can be controlled by Key or Communication.
The Manual Control Output is to control the PID Control Output before the Heating/Cooling output calculation.
Although the Cooling PID calculation range is 0 ~ 50%, the output range is adjusted to 0~100%.
Likewise, although the Heating PID calculation range is 50~100%, the output range is adjusted to 0~100%.
【Fig. 2-3】+ SV Dead Band
(ON/OFF Control for both Heating and Cooling)
HYSTERESIS
DEAD BAND
HYSTERESIS
OFF(neutral)
ON
ON
【Fig. 2.4】+ SV Dead Band
(PID Control for both Heating and Cooling)
Cooling
Heating
Output (%)
0
Fig. 2.5】-SV Dead Band
(PID Control for both Heating and Cooling)
Cooling
Heating
Output (%)
0
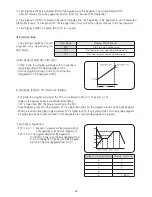
• 2-DOF PID Alpha (AP)
Response in a typical closed loop control system
can be divided in response to the disturbance and
the response to the setting change. And the existing PID
(1 degree of freedom) algorithm have a limit to optimize
only one response for the two responses.
To overcome this limitation, we applied two degree of
freedom PID algorithm and got an optimized response to
the setting change and a proper response to
the disturbance.
Alpha (AP) parameter is used to adjust the response
characteristics of the set value (SV) change.
175
155
135
115
95
75
55
35
0
100
Reference
Alpha 0
Alpha 50
Alpha 100
200
300
400
500
600
700
800
Alpha=0
Alpha=100
Alpha=50
DEAD BAND
DEAD BAND
Содержание NP200
Страница 2: ......







































































