





























Chapter 7 Setting Robots
80
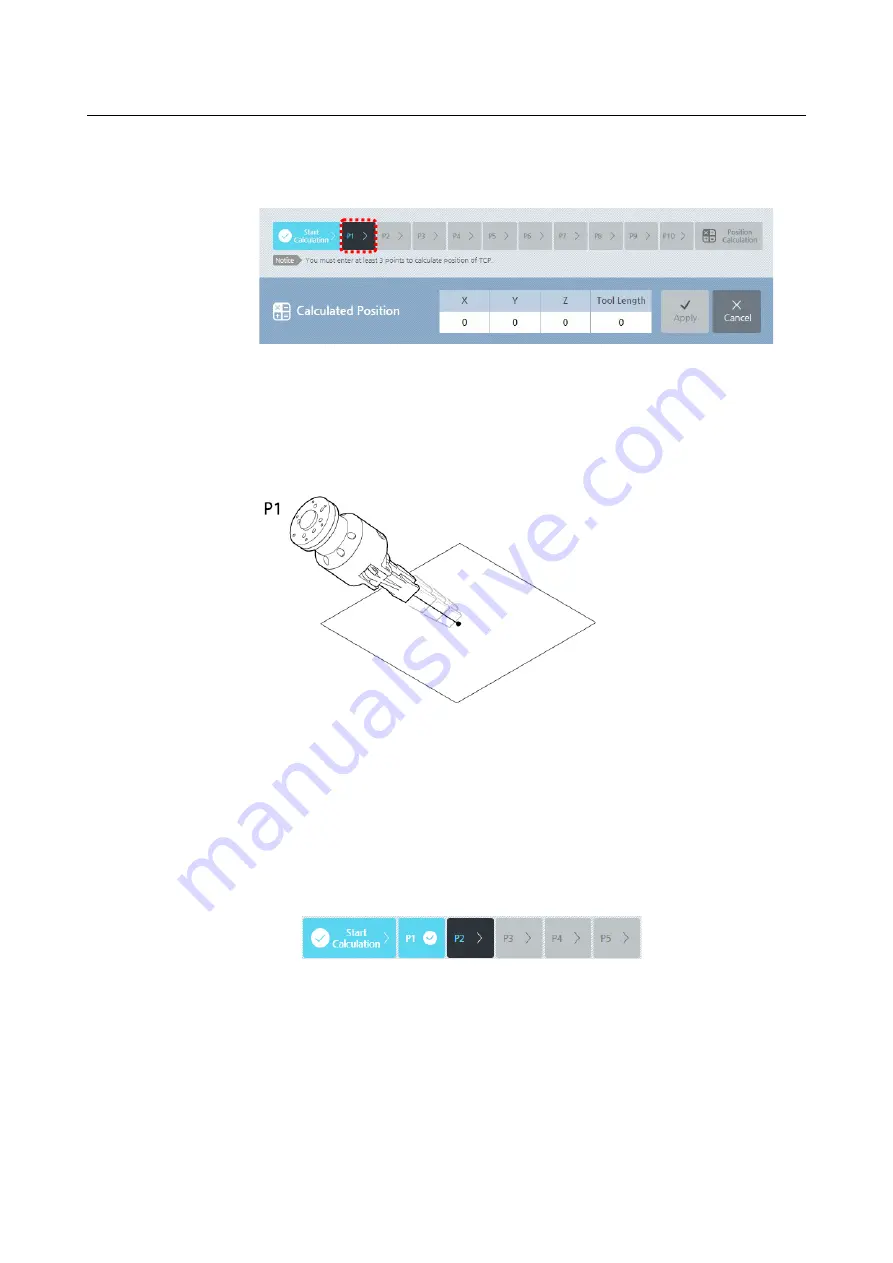
3.
Press the
P1
button when it is activated.
If you press the
P1
button, the
Manual Move
screen will appear.
4.
While pressing down the
Direct Teaching
button in the
Manual Move
screen,
move the robot arm to place the tip of the tool right at the reference point.
For more descriptions on the
Manual Move
screen, refer to 5.3 Manual Move
Screen.
5.
In the
Manual Move
screen, press the
OK
button.
6.
When the
P2
button is activated, repeat steps 3 through 5.
An error will occur if the previously inputted coordinate and the currently
inputted coordinate do no differ by more than 10
°
. The point button with errors
will be marked in red. If an error occurs, then you need to change and reset the
angle for that point.
The more the point data is, the more accurate the calculation result becomes.
You can set the maximum 10 points.
Содержание HCR-5
Страница 1: ...HCR 5 Collaborative Robot User Manual Aug 2019 V 2 001 ...
Страница 2: ......
Страница 14: ......
Страница 96: ...Chapter 8 Safety Settings 96 ...
Страница 101: ...Chapter 8 Safety Settings 101 3 Press the OK button ...
Страница 177: ...Chapter 12 Device Settings 177 B When the scanning location and the robot s location are shifted by X ...
Страница 188: ...Chapter 15 Maintenance 188 4 When the confirmation window appears press YES ...
Страница 192: ...192 Appendix B Certification Safety ...
Страница 193: ...193 ...
Страница 194: ...194 MD Machinery Directive ...
Страница 195: ...195 LVD Low Voltage Directive ...
Страница 196: ...196 EMC Electro Magnetic Compatibility ...
Страница 197: ...197 Cleanroom Body ...
Страница 198: ...198 Cleanroom Controller ...
Страница 199: ...199 Appendix C Dimensions for Installation ...
Страница 200: ...200 Appendix D Tool Flange Cross Section The tool flange is designed suitable for ISO9409 1 50 4 M6 ...
Страница 205: ......