





























3
Commissioning
Festo – EXCM-30/-40-...-PF-EN – 1603 – English
29
3.2.6
Ethernet interface [X5]
The Ethernet interface can thereby be used both for control via the FCT and also for operation via the
function “Control via Ethernet” (CVE).
Note
Use a network cable of category 5 or better.
3.2.7
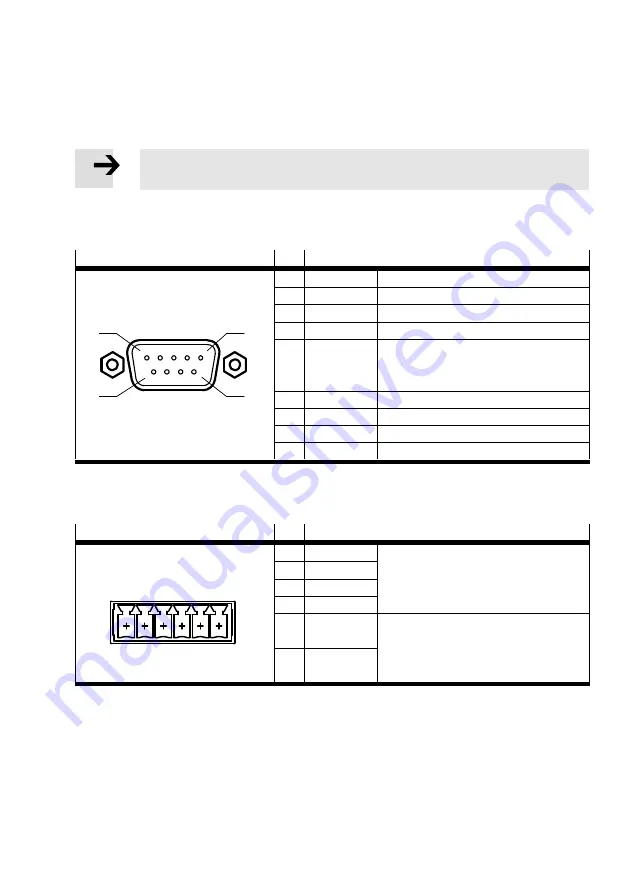
Encoder connection
An incremental encoder with signals in accordance with RS422 can be connected to the encoder port.
Connection
Pin
Function
5
9
6
1
1
A
Encoder signal A+
2
B
Encoder signal B+,
3
N
Encoder signal zero pulse N+
4
GND
Reference potential
5
Vcc
+5 V ±10 % supply of the encoder.
Max. 100 mA, not secure against short
circuit.
6
A/
Encoder signal A–
7
B/
Encoder signal B–
8
N/
Encoder signal zero pulse N–
9
–
Reserved
Tab. 3.6
Encoder connection
3.2.8
Motor connection
Port
Pin
Function
1
6
Interface at the controller
1
A
Connection of the motor strings
2
A/
3
B
4
B/
5
BR+
Connection of the holding brake.
Short-circuit- and overload-protected.
BR– = GND,
BR+ is switched (+24 V)
6
BR–
1)
Next to the motor connections is an M4 threaded pin to connect the screening of the motor cable through a cable lug
Tab. 3.7
Motor connection







































































