



























HI/lo defInITIonS: ouTPuTS
Input
State
Condition
brake
[ouT5]
HI
output transistor is off
brake is un-powered and locks motor
motor cannot move
brake state is active
lo
output transistor is on
brake is powered, releasing motor
motor is free to move
brake state is noT-active
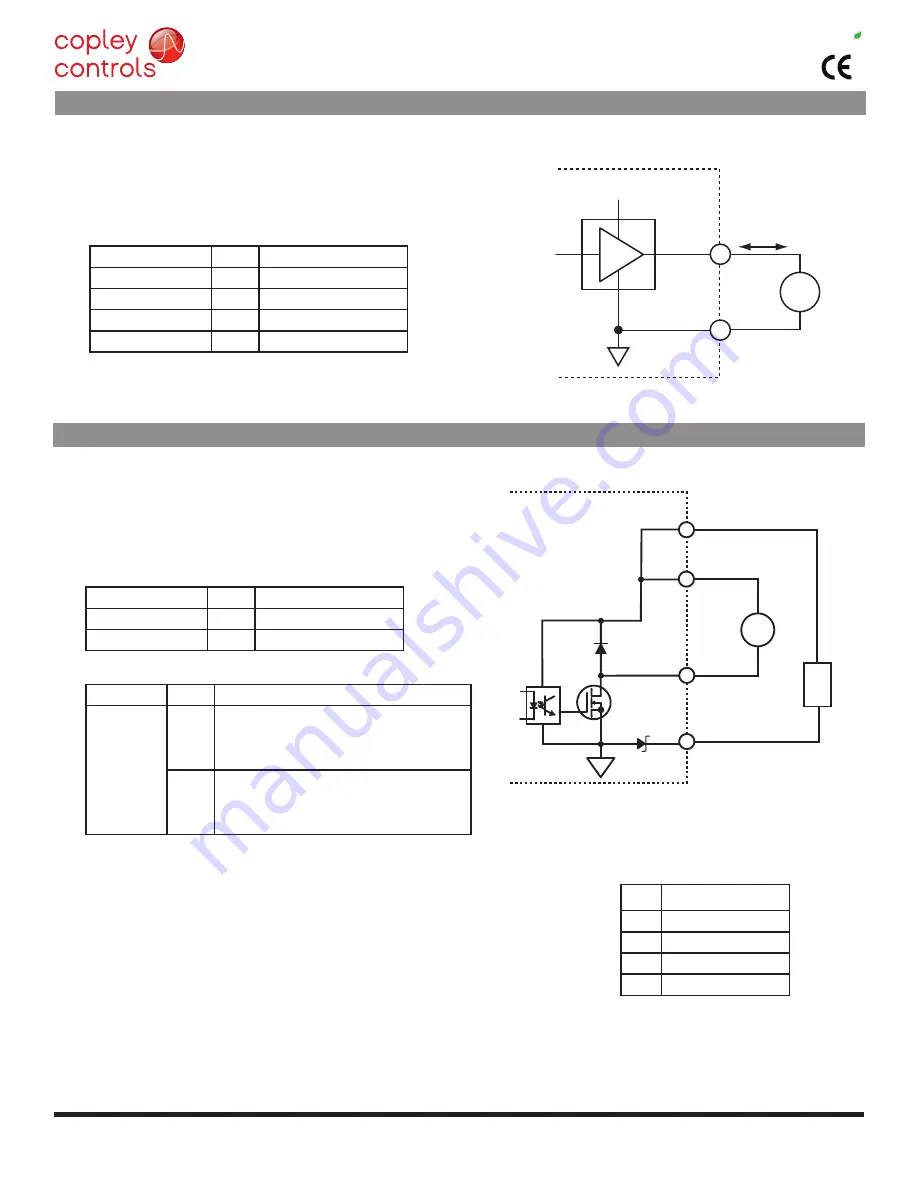
SPeCIfICaTIonS
output
Data Notes
Voltage range
max
+30 Vdc
output Current
Ids
1.0 adc
SPeCIfICaTIonS
output HI
Data Notes
Vout HI
Voh
4.4 Vdc
Iout HI
Ioh
-8.0 madc
Vout lo
Vol
0.40 Vdc
Iout lo
Iol
8.0 madc
J3 ConneCTIonS
Pin
Signal
4
brk 24V Input
3
brk 24V output
2
brake [ouT5]
1
24V return
J3
Brake [OUT5]
4
3
24V
Brk 24V Input
Brk 24V Output
24V Return
2
1
i
+
0
J6
+5 Vdc
[OUT4]
±8 mA
R
Sgnd
Copley Controls, 20 Dan Road, Canton, MA 02021, USA
P/N 16-01436 Rev 01
Page 15 of 28
RoHS
Xenus
PLUS
Compact
CANopen
XPC
• brake output
• opto-isolated
• flyback diode for inductive load
• 24V Compatible
• Connection for external 24V power supply
• Programmable functions
• CmoS buffer
• 74aHCT1G125
• Programmable functions
Cme2 default Setting for brake output [ouT5] is “brake - active HI”
active = brake is holding motor shaft (i.e. the
Brake is Active
)
motor cannot move
no current flows in coil of brake
Cme2 I/o line States shows output 4 as HI
brk output voltage is HI (24V), moSfeT is off
Servo drive output current is zero
Servo drive is disabled, PWm outputs are off
Inactive = brake is not holding motor shaft (i.e. the
Brake is Inactive
)
motor can move
Current flows in coil of brake
Cme2 I/o line States shows output 5 as lo
brk output voltage is lo (~0V), moSfeT is on
Servo drive is enabled, PWm outputs are on
Servo drive output current is flowing
The brake circuits are optically isolated from
all drive circuits and frame ground.
opto-Isolated Motor brake output: out5
hIgh-speed output: out4







































































