





























RE 92076-01-B/2021-04-22, Bosch Rexroth AG
About this product |
A4... with HS5E(V)(L) control system Series 1x and 30 25
/104
In general, for the transition of a system from a given initial state to a given final
state, a fast transition as well as a stable state are aimed for. Various control
algorithms are used in control engineering to implement these requirements.
The HS5E pilot control valve has 4 sets of control parameters to allow optimum
adjustment to plant-specific requirements. For this, up to four instances of the
relevant parameters for control are created in the HydraulicDrive after activation
of the respective set of control parameters. The setting of the individual controller
parameters depends on the control properties of the overall system. In this
connection, you must take into account the following factors:
• The hydraulic layout of the system (e.g. piping, branches)
• The connected oil volume
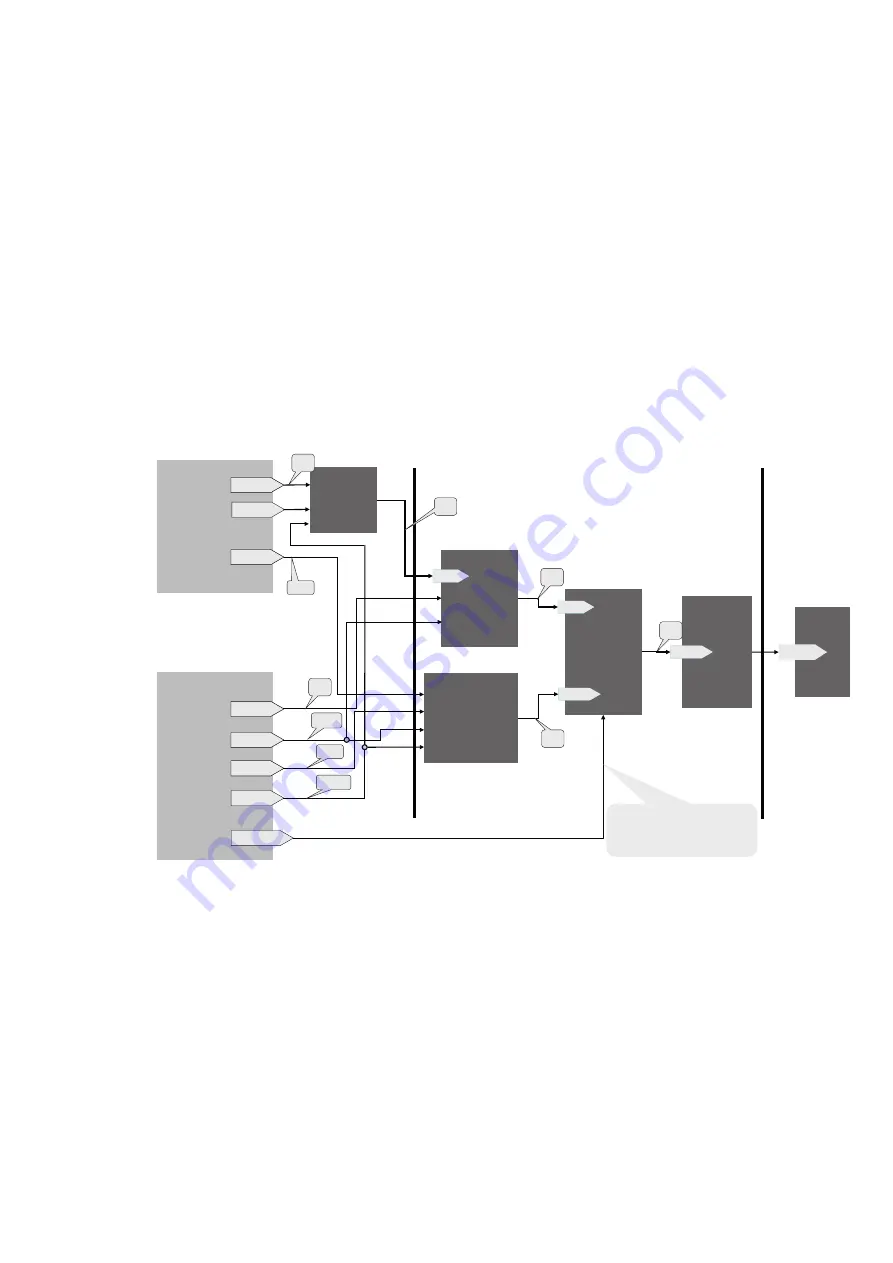
5.3.1 Parallel control structure
The control structure below is used in the HydraulicDrive:
Fig. 3: Overview of controller parallel structure
The parallel structure with the pressure and swivel angle controllers is called in the
"Pressure and swivel angle control" or "Pressure/flow control" operating modes.
The swivel angle command value is adapted in swivel angle command value
processing before it is passed on to the actual swivel angle controller.
For pump control, the pressure and swivel angle controllers are active at the same
time and both generate a manipulated variable. In the pump switching logic, the
system passes on as standard the lowest manipulated variable from these two
controllers (minimum value former function). Using this minimum value former
ensures that only one of these two pressure or swivel angle variables is ever
regulated and that it is possible to dynamically switch between both control modes.
It is possible to modify the output parameter of the pump switching logic using
different characteristic curves and functions in the pump manipulated variable
P-0-2954
P-0-2956
α Ist
P-0-2914
S-0-0882
P-0-2957.0.6
P2958.0.1
S-0-0809
α Ist
.
p Ist
p Ist
.
P-0-2972
P-0-2803
[%]
[bar]
[%]
[bar]
[%]
[%]
[%]
[%]/s
[bar]/s
[%]
P-0-2951 Bit 9
P-0-2992
P-0-2986
P-0-2952
Swivel angle
command value
Torque limiting
Pump
Swivel angle
command
value
processing
Swivel angle
controller
XREG
VREG
Valve
controller
(100us)
Pressure
controller
Swivel angle
actual value
Actual pressure
value
Pressure sign
Derivation of
actual swivel angle
value
Derivation of
actual pressure
value
Pressure
command value
Controller
Only relevant with closed circuit
BIT sign:
0: if actual pressure value B > actual pressure value A
1: if actual pressure value B < actual pressure value A
Actual value acquisition
Changeover
logic of pump
parallel
Manipulated
variable
adjustment
Pump
Valve
controller