





























APPEAR AS
Confidential
186/352
Remap
The input component referenced will be remapped to a specified output PID
–
this PID will not be reallocated by the system to prevent PID clashes.
Passthrough
The component will be mapped to the same output PID as its input PID
–
this
PID may be reallocated by the system to prevent PID clashes.
In systems with dynamic behavior on the input, it is recommended to create a rule for all PIDs to be added to the
output if a fixed and dedicated line-up is required. This way, it is easier for this system to decide what action to
take when the input changes. In some cases, a lack of definition will force the system to temporarily stop PIDs.
For example, a TTX PID in Passthrough mode changes on the input to a PID value already assigned manually on
the output. In this case, the PSI system will stop the signaling of that TTX PID until the system has decided what
to do with the TTX PID
–
i.e. automatically map it to a new, free PID value.
In an output service, if a video PID with PCR is stopped then this will be stopped on the
output, but the PCR can be extracted and output. This can be used in cases where you would
like to create a radio service using a PCR from a signaled video PID in the service.
8.3.8.2
Component multiplexing
With Service component multiplexing it is possible to add a Audio, Teletext, DVB Subtitle, AIT, HbbTV-
carousels or private component from another input source to an outgoing service. This PID will be
multiplexed into the outgoing stream and signalled in the PMT of the service.
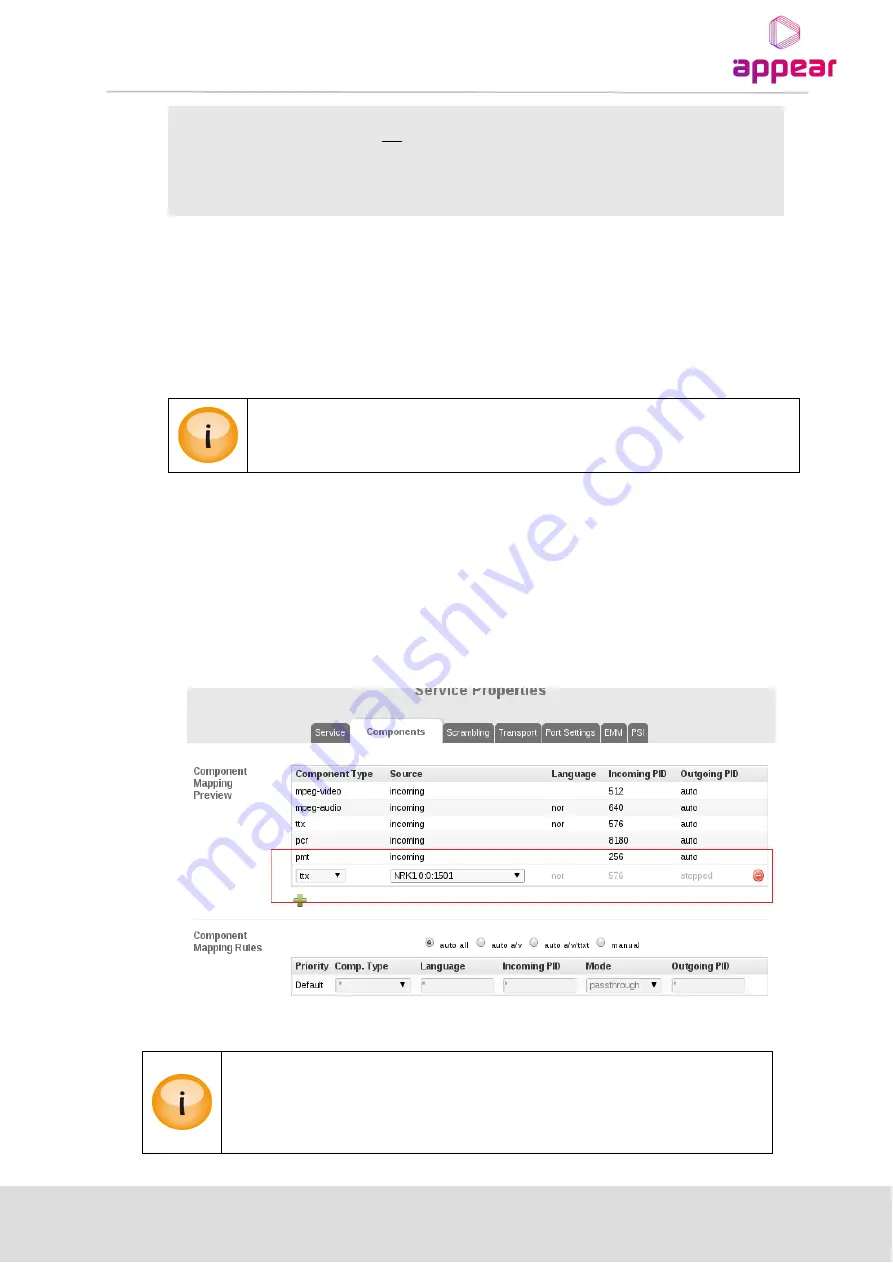
Adding components to an outgoing service is done on the Components Mapping section by clicking the
plus button. This will show a selection dialog where all valid Audio, Teletext, DVB Subtitle, AIT, HbbTV-
carousels or private PID that can be selected for output.
Any input Audio, Teletext/DVB Subtitle source that is not synchronized with the output
video (ie PTS) could possibly have issues with display. Users must ensure that the added
component is synchronized for this feature to be enabled correctly.
If the PID is not synchronized with the output video, no alarms will be raised.







































































