





























C6-9
IM 34M06H62-02E
2nd Edition : June 2008-00
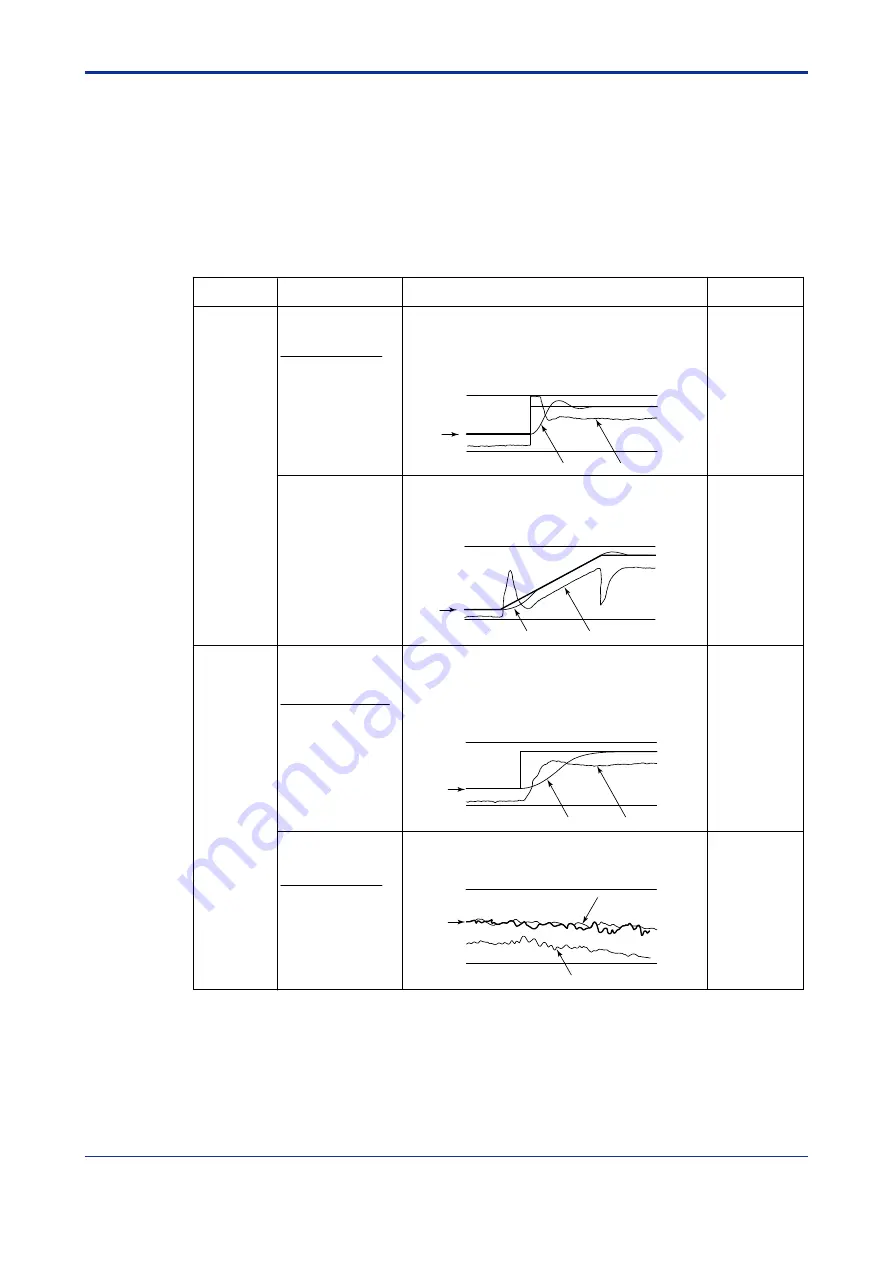
C6.6 PID Control Mode
This module provides 2 PID control modes, namely, Standard PID Control mode and
Fixed-point Control mode, which are selectable using the Control Mode (CMD)
parameter.
In either control mode, either PV Derivative Type PID Control Method or Deviation
Derivative Type PID Control Method is adopted depending on the operating mode.
Furthermore, the control mode also determines whether the control output value bumps
when the Set Point (1.SP to 4.SP) selected using the SP Number Selection parameter is
changed.
PID Control
Mode Type
Control Method
Description of Control Operation
Operating Status
Standard PID
control mode
(factory setting)
PV derivative type PID
Bump in control output
when CSP is changed
Deviation derivative type
PID
SP
CSP
SP
SP
PV
OUT
PV
OUT
PV
OUT
OUT
PV
Fixed-point
control mode
PV derivative type PID
Bumpless control output
when CSP is changed
PV derivative type PID
Bump in control output
when CSP is changed
Local
Remote or
Cascade
Local
Remote or
Cascade
Adopt PV derivative type PID in order to quickly bring the
PV to an updated CSP. The PV derivative type PID
control method immediately generates a fraction of the
output defined by the ratio of the deviation generated by a
change in CSP to the proportional band (PB) parameter
to quickly bring the PV to an updated CSP.
The deviation derivative type PID control method tracks a
programmed pattern closely by activating derivative
action (TD) for deviation arising from minute changes in a
CSP that varies successively, following a programmed
pattern.
Use this function to avoid disorder in the PV due to over-
reaction in the control output value (OUT) in response to
a change in the CSP in continuous fixed-point control.
In PV derivative type PID control with bumpless control
output, when CSP is changed, only integral action (TI) is
employed to gradually remove the resultant deviation,
without a sudden change in the output value (OUT).
Use this function when the secondary loop in cascade
control is used. It produces stable control output, which
does not over-react to output from the primary loop.
Figure C6.10 PID Control Mode
Summary of Contents for F3CU04-0S
Page 2: ...Blank Page...
Page 18: ...Blank Page...
Page 32: ...Blank Page...
Page 34: ...Blank Page...
Page 50: ...Blank Page...
Page 90: ...Blank Page...
Page 118: ...Blank Page...
Page 130: ...Blank Page...
Page 204: ...Blank Page...
Page 222: ...Blank Page...
Page 224: ...Blank Page...
Page 228: ...Blank Page...
Page 230: ...Blank Page...
Page 232: ...Blank Page...
Page 234: ...Blank Page...
Page 240: ...Blank Page...
Page 242: ...Blank Page...
Page 254: ...Blank Page...
Page 258: ...Blank Page...
Page 260: ...Blank Page...





















































