










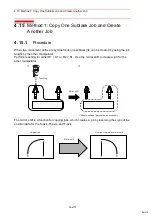

















4.15 Method 1: Copy One Subtask Job and Create Another Job
4-27
Jobs Not to be Converted
The jobs and relative jobs without group axes cannot be converted.
Group Axes for Conversion
When the group axes for the SOURCE JOB in the multiple group axes system, the axis con-
figuration, etc. of each group axes for SOURCE JOB and DESTINATION JOB must be the
same.
• Robot axis: Same type
• Base axis: Same axis configuration
• Station axis: Same axis configuration
Position Type Variables
The position type variables are not for mirror-shift.
Parameter
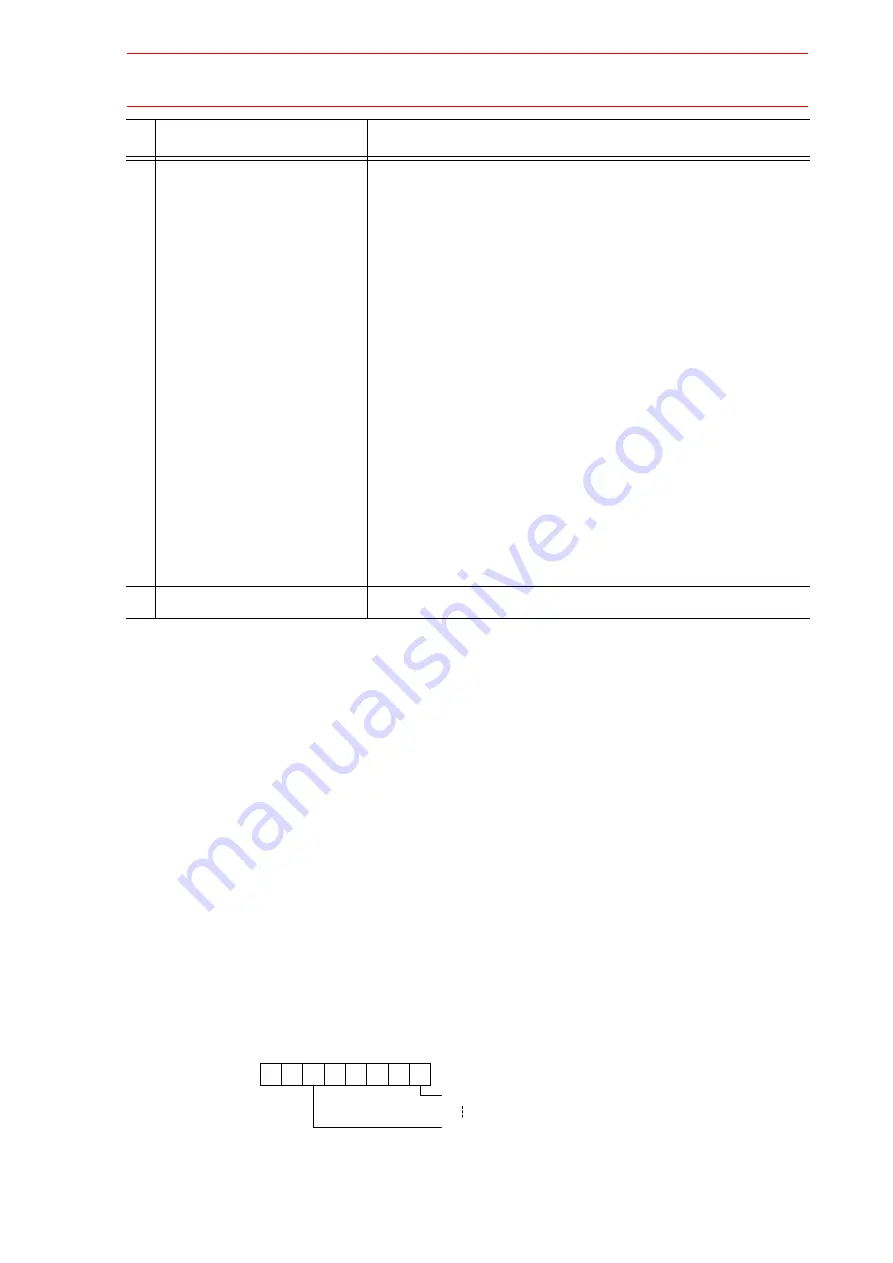
Which axis is to be shifted (reverse the sign) is specified by the following parameter.
S1C
G065: Mirror shift sign reversed axis specification
4
(cont’d)
USER COORD NO.
Specifies the user coordinates number when "USER" is
selected in
. "01" is automatically set as initial value
when the "USER" is selected in
.
This item cannot be set when "PULSE" or "ROBOT" is
selected in
.
TARGET
Specifies the coordinate where conversion is to be done
when "ROBOT" or "USER" is selected in
. "XY," "XZ,"
or "YZ" can be selected. The "XZ" is automatically set as
initial value when "ROBOT" or "USER" is selected in
.
Always specify "XZ" for "ROBOT."
EXECUTE
Executes the conversion. When the conversion destina-
tion job name is entered, the converted job is created
with that name as a new job. When the conversion desti-
nation job name is not entered, the conversion source
job is converted and overwritten.
5
Select "EXECUTE."
Operation
Explanation
1st axis (0: Not reversed, 1: Reversed)
6th axis
T B R
L S
U
91/210







































































