


























4.16 Method 2: Perform Teaching for Each Manipulator
4-38
12 Select a job to be registered
as root job.
The root jobs for subtask 1 and subtask 2 are registered.
13
Select the synchronous task
of subtask 1.
14 Select “SUB2.”
Specify SUB2 of leader task to synchronize the synchronous task
of subtask 1.
15 Select “Single job operation
mode.”
Set “Single job operation mode” for the operation mode at FWD
operation.
Pressing [SHIFT] + [SMOV] switches the operation mode.
16 Select {JOB} under the main
menu.
17 Select {JOB}.
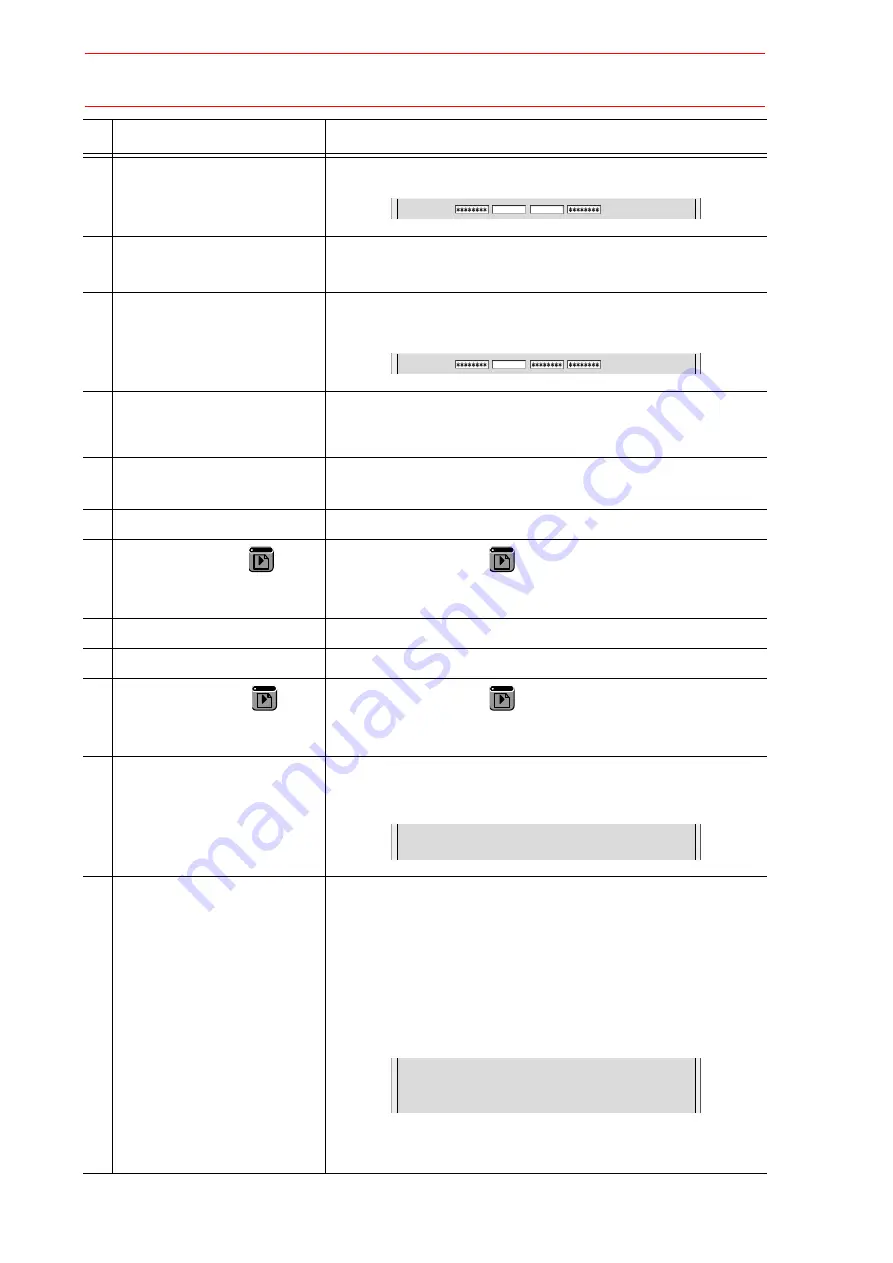
18
Press the page key
to
chage to leader subtask.
*
Each time the page key
is pressed, the contents of the JOB
CONTENT window change in order of master task, subtask 1,
and subtask 2.
19 Move the cursor to the step 1.
20 Press [FWD].
21
Press the page key
to
change to the leader subtask.
Each time the page key
is pressed, the contents of the JOB
CONTENT window change in order of master task, subtask 1,
and subtask 2.
22 Register the step 1 of follower
subtask.
After the FWD operation of step 1 of leader, switch to follower and
register the position of the follower manipulator relative to the
station current position.
23 Register the step 2 and
onward of follower subtask.
Change to the leader’s JOB CONTENT window and perform
FWD operation to the next step.
To maintain the follower manipulator position relative to the sta-
tion, press [SHIFT] + [SYNCRO/SINGLE] to set the job syn-
chronized mode.
Change to the follower’s JOB CONTENT window, and register
the follower manipulator position relative to the station current
position.
Teach the follower job by repeating the above operations
and
.
Operation
Explanation
JOB-R1
JOB-R2
MASTER SUB1
SUB2
SUB3
ROOT JOB
SYNC TASK
SUB2
MASTER SUB1
SUB2
SUB3
PAGE
GO BACK
PAGE
GO BACK
PAGE
GO BACK
PAGE
GO BACK
0000
0001
NOP
SMOVL V=276
+MOVJ
0000
0001
0002
NOP
SMOVL V=276
+MOVJ
SMOVL V=276
+MOVJ
102/210