



























49
CHAPTER2 PROFIBUS Unit
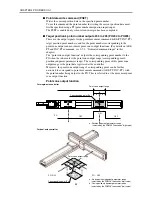
(2) Outputting the point number at the timing that a movement command
is received
ABS-PT/INC-PT
(Point movement command)
(Target position's point number
outputs 200 to 205)
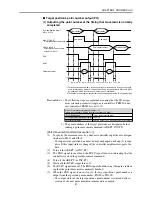
END
BUSY
Robot movement
Movement
q
Command
w
Command
q
Movement
w
Point number output
q
Point number output
w
30ms or less 1ms or less
1ms or less
30ms or less 1ms or less 1ms or less
PO200 to 205 *2
Data retention
q
Data retention
w
Axis designation data *1
SI213, SI214
*2 The number of point number outputs that can be used depends on the I/O assignment type.
30ms or more
30ms or more
*1 For dual-axis controllers only. In the case of dual-axis controllers, all axes are usually
used for movement. However, the desired axis can be specified with SI213 and SI214
by enabling PRM10 (Control axis selection with I/O command).
Precondition: 1) The following steps are explained assuming that the I/O assign-
ment selection parameter (single-axis controllers: PRM59, dual-
axis controllers: PRM26) is set to 130.
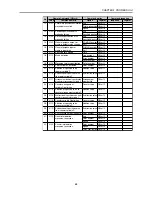
I/O assignment type
Permissible number of movement points
Point output selection
When I/O assignment selection parameter = 130
(single-axis controllers: PRM59, dual-axis controllers: PRM26)
Type 3 (point teaching type)
64 points
Point No. output to PO when movement command is received
2) The point numbers of the target positions are designated before
running a point movement command (ABS-PT, INC-PT).
[Point movement command execution
q
]
(1)
To specify the movement axis by a dual-axis controller, input the axis designa-
tion data to SI213 and SI214.
• The input status specified here must be kept unchanged until step (3) is com-
plete. If this input status is changed, the controller might misrecognize the
data.
(2)
Turn on the ABS-PT (or INC-PT).
(3)
The END signal turns off and the BUSY signal turns on, indicating that the
controller received the point movement command.
(4)
When the BUSY signal turns on in step (3), the target position's point number
is output from the specified point number (PO200 to PO205).
• The output status of the target position's point number is retained until the
next point movement command is received.
(5)
Turn off the ABS-PT (or INC-PT).
(6)
Wait until the BUSY signal turns off.
(7)
The BUSY signal turns off. The END signal should be on at this point, indicat-
ing that the point movement finished normally.
↓







































































