



























129
CHAPTER2 PROFIBUS Unit
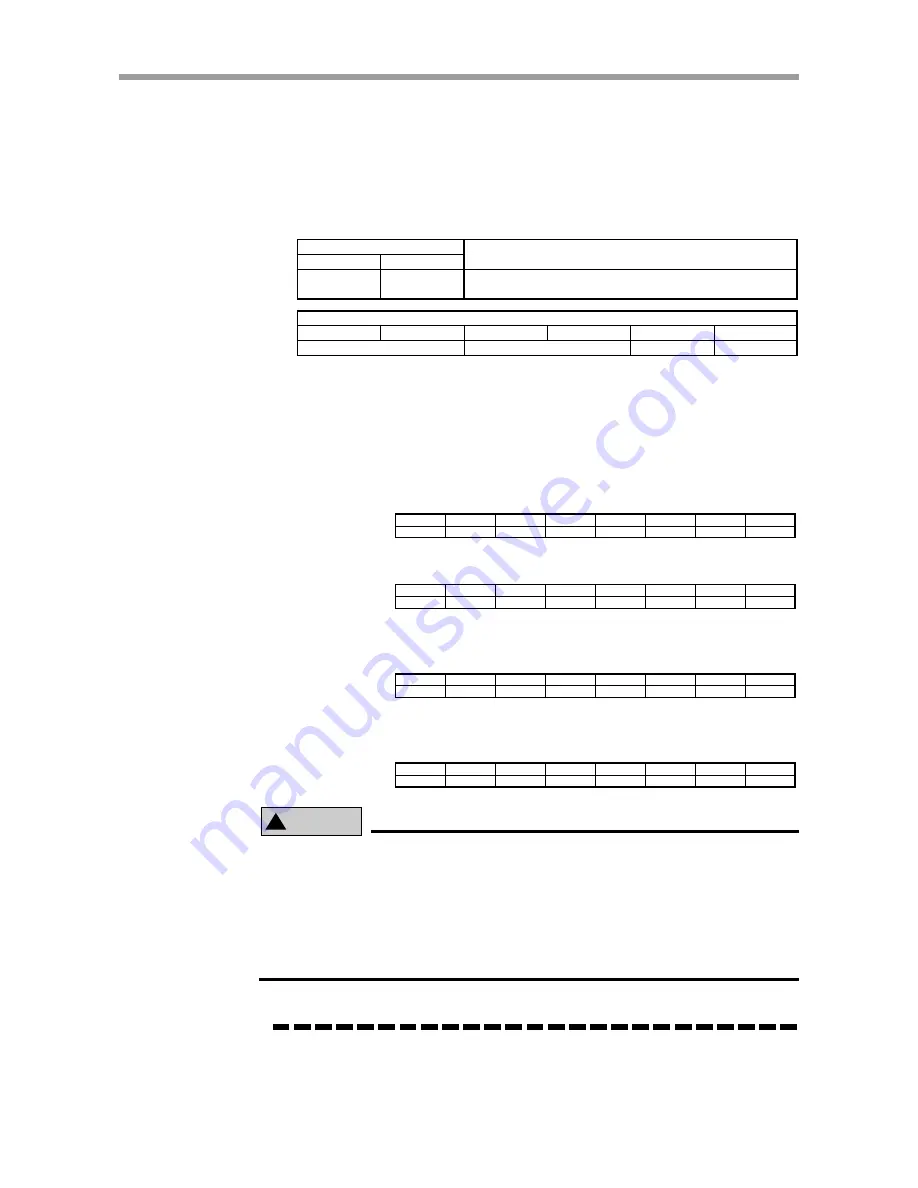
2-12-8 Current position indication mode
The current position indication mode is selected by setting 0001 to QWn+10.
In the current position indication mode, the current position of the robot is always output
to IWm+16 to IWm+22 regardless of the execution status or no-execution status of the
remote command. The position of the robot can be always grasped by selecting the cur-
rent position indication mode.
0001
xxxx
RWwn+1
RWwn
Remote command
Current position information is displayed in IWrn+16 to
IWrn+22.
Meaning of command
Command response
IWm+22
IWm+20
IWm+18
IWm+16
IWm+14 IWm+12
Y axis position
X axis position
(Details)
Axis position:
The current position of the robot is indicated (unit: 0.01mm). If
the rotary axis is set for the robot, the unit of the movement posi-
tion is 0.01 degrees.
IWm+20 to IWm+22 is not used in single-axis controllers.
(Example)
Transmission example 1:
Current position is output by current position display mode.
QWn+22 QWn+20 QWn+18 QWn+16 QWn+14 QWn+12 QWn+10
QWn+8
0000
0000
0000
0000
0000
0000
0001
0000
Response example 1:
The current position of the robot is X=321.05 and Y=-0.02.
IWm+22
IWm+20
IWm+18
IWm+16
IWm+14 IWm+12 IWm+10
IWm+8
FFFF
FFFE
0000
7D69
0000
0000
0000
0000
Transmission example 2:
Move to the position of X=50.37 and Y=45.55 at the 100% speed
in the current position indication mode.
QWn+22 QWn+20 QWn+18 QWn+16 QWn+14 QWn+12 QWn+10
QWn+8
0000
11CB
0000
13AD
0064
0000
0001
0108
Response example 2:
Moving to the target position is normally ended. (The current po-
sition of the robot is X=50.37 and Y=45.55)
IWm+22
IWm+20
IWm+18
IWm+16
IWm+14 IWm+12 IWm+10
IWm+8
0000
11CB
0000
13AD
0000
0000
0000
0200
!
CAUTION
Before executing a command which uses IWm+16 to IWm+22 as the response
such as the specified point data read command (code 0217), cancel the current
position indication mode. If the current position indication mode is kept, the
command response overlaps with the current position indication and the data
cannot be normally read out.
Do not use the current position indication mode when executing a command
which uses IWm+16 to IWm+22 as the response.
M E M O
M E M O
The renewal interval of the current position is every 10 milliseconds. Accordingly,
when the robot moves at a high speed, the error becomes large between the actual
position of the robot and the robot position sent as the response.







































































