





























19
CHAPTER2 PROFIBUS Unit
■
Origin return command (ORG-S)
This command performs origin return when the search method was selected as the
origin detection method, or checks the origin return status if the mark method was
selected.
On dual-axis controllers, you can specify the axis for origin return with SI213, SI214
by making PRM10 varid.
M E M O
M E M O
When performing origin return on a search method axis, if both a mark method axis
and a search method axis are present, then origin return must first be completed on
the mark method. Mark method origin return is performed on the HPB.
M E M O
M E M O
Once origin return is performed after the absolute battery and robot cable are con-
nected, it does not have to be performed again, even if the power is turned off. (Ex-
ceptions to this are if the absolute battery backup was disabled or origin-point related
parameters were changed. Origin point is then incomplete (pending) and must be re-
performed.
!
CAUTION
Do not halt on-going origin return during origin point detection (while contact-
ing the mechanical limits) when using the stroke end origin detection method. A
controller overload will trigger an alarm stop condition and the power must be
turned off and then on again.
!
CAUTION
When repeating origin return by the stroke end detection method is unavoid-
able, wait at least 5 seconds before trying it again.
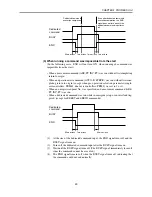
■
Servo ON command (SERVO)
After an emergency stop, cancel it by releasing the emergency stop switch. This trig-
gers an input to turn the servo power on, and the robot can then resume operation.
(The SERVO command is also a pulse input, so must be turned OFF when BUSY
turns ON.)
On dual-axis controllers, the servo recovery axis can be specified with S1213, S1214
by making PRM10 varid.







































































