

























5 Commissioning and operation
| Creating motion profiles with the configuration application
33
Manual Stepper motor module UR20-1SM-50W-6DI2DO-P
2575290000/03/03.2020
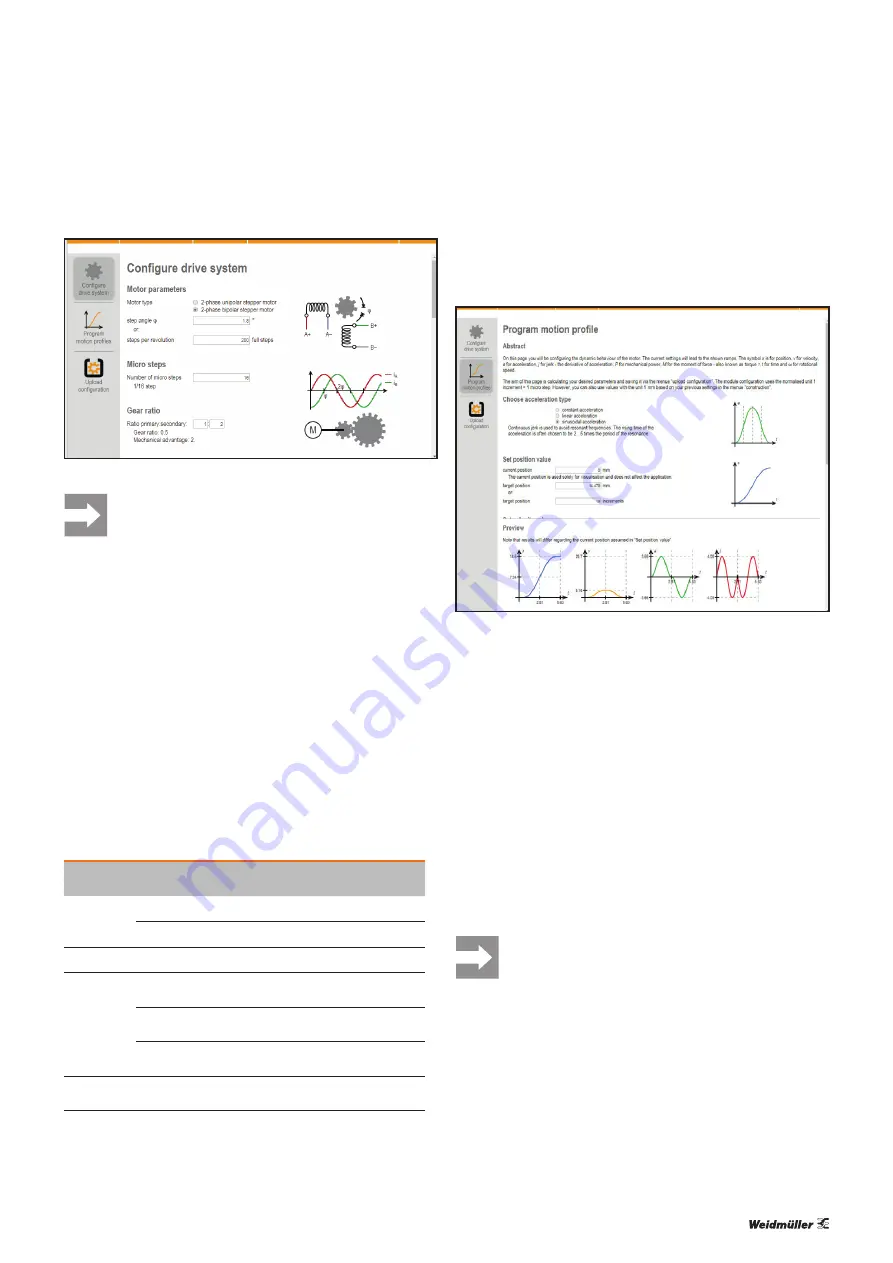
Configure drive system
All values that you enter under “configure drive
system” are only used to calculate the motion
profiles and are not stored in the module.
For general operation, configure the drive system
by parameterising the module for the drive sys-
tem (see Section 5.4).
▶
Enter the step angle of the stepper motor in the “step
angle φ” field or enter the number of full steps per revolu
-
tion in the “steps per revolution” field.
▶
Enter the number of micro steps per full step in the “num-
ber of micro steps” field.
▶
Enter the gear ratio of the pre-switched gears in the “ratio
primary:secondary” field.
If you do not use gears, use gear ratio 1:1.
▶
Select the actuator type under “linear actuator”.
▶
Enter the length unit that you want to use in the configu-
rator in the “unit” field.
▶
Complete the other fields in order to specify the actuator.
Actuator
type
Specification Description
Threaded rod Lead length
Threaded feed per revolution
Threads per unit Number of threads per length unit
Ball screw
Lead length
Threaded feed per revolution
Timing belt
Tooth pitch
Spacing of the centre lines of two adja-
cent teeth on the pitch circle
Number of teeth
(pulley)
Number of teeth on drive wheel
Pitch circle
circumference
Diameter of the pitch circle
Rotary table Positions per
revolution
Number of discrete positions per revoluti-
on in the selected unit
▶
Check the automatically calculated values under “sum-
mary” and adjust your entries if necessary.
Programming a motion profile
▶
Click on “program motion profiles”.
Program motion profiles
▶
Select an acceleration type under “choose acceleration
type” (see section 5.8).
▶
Program the motion profile by completing the fields
under “set position value”, “set velocity value”, “set accel-
eration value” and “set jerk”.
Under “preview” you can view the current programmed mo-
tion profile. The preview is updated after each entry.
▶
Check again under “preview” whether the motion profile
corresponds with your specifications.
▶
Under “save ramp to a register”, enter the page and the
data set of the motion register where the motion profile is
to be saved.
▶
Click on “save” to save the motion profile in the motion
register setup.
All settings first take effect after they have been
written to the module.





















































