





























10 Function Code Instructions
215 SD780 Series Servo Technical Manual
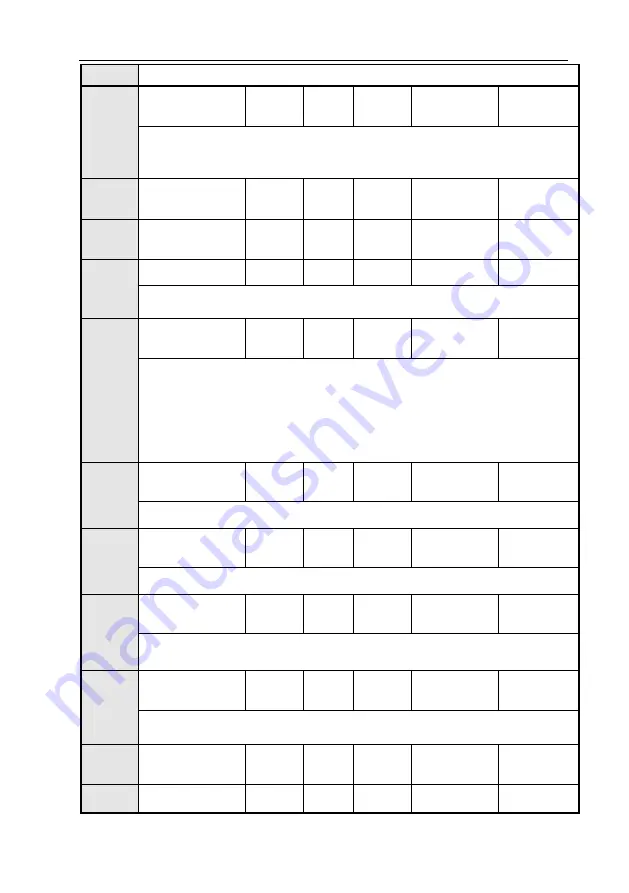
1- Use V-REF as speed feed forward input.
Pn124
Speed/position
control selection (T-
REF assignment)
0
~
1
0
-
0x0124
After restart
Torque feedforward is a function to shorten the positioning time. Torque feedforward can be selected by
external analog T-REF.
0-None.
1- Use T-REF as a torque feed forward input.
Pn125
Time constant of
speed feedback
filtering
0.0
~
655.35
0.0
ms
0x0124
After restart
Pn126
Velocity feedback
moving average filter
time constant
0x0000
~
0x0014
0
125us
0x0124
After restart
Pn130
Speed loop control
method (PI/IP)
0
~
1
0
-
0x0130
After restart
0-PI control.
1-IP control.
Pn131
Speed loop P-PI
switching condition
selection
0x00
0x04
0
-
0x0131
Immediately
This is a function that automatically switches P control and PI control. Through setting the switching
condition by this parameter and meeting the corresponding switching condition can suppress overshoot
during acceleration and deceleration and shorten the settling time.
0- Conditioned by internal torque command.
1- Conditioned by speed instruction.
2- Conditioned by acceleration.
3- Conditioned by position deviation pulse.
4- No mode switch function.
Pn132
Speed loop P-PI
switching condition
(torque command)
0
~
800
200
%
0x0132
Immediately
When the torque command exceeds the torque set by this parameter, the speed loop will be switched to
P control, otherwise PI control.
Pn133
Speed loop P-PI
switching condition
(speed command)
0
~
10000
0
rpm
0x0133
Immediately
When the speed command exceeds the speed set by this parameter, the speed loop will be switched to
P control, otherwise PI control.
Pn134
Speed loop P-PI
switching conditions
(acceleration)
0
~
30000
0
rpm/s
0x0134
Immediately
When the speed command exceeds the acceleration set by this parameter, the speed loop will be
switched to P control, otherwise PI control.
Pn135
Speed loop P-PI
switching conditions
(position deviation)
0
~
10000
0
command
unit
0x0135
Immediately
When the position deviation exceeds the value set by this parameter, the speed loop will be switched to
P control, otherwise PI control.
Pn136
The speed loop P/PI
switching condition
(line) (speed)
0
~
10000
0
mm/s
0x0136
Immediately
Pn137
Speed loop P/PI
switching condition
0
~
30000
0
mm/s
²
0x0137
Immediately





















































