





























9 Internal Position
196 SD780 Series Servo Technical Manual
As shown in the figure above, the first position command setting value is PosCmd0. After the pulse
of Pos0 is run, the operation ends and the remaining PosRem0 pulses are not completed. If the
second relative position command PosCmd1 is inserted at this time, the total number of pulses of
the second position command operation is PosCmd1. That is, the second relative position value
PosCmd1 is the reference point of the actual position Pos0, and the final running position value is
Pos0 + PosCmd1.
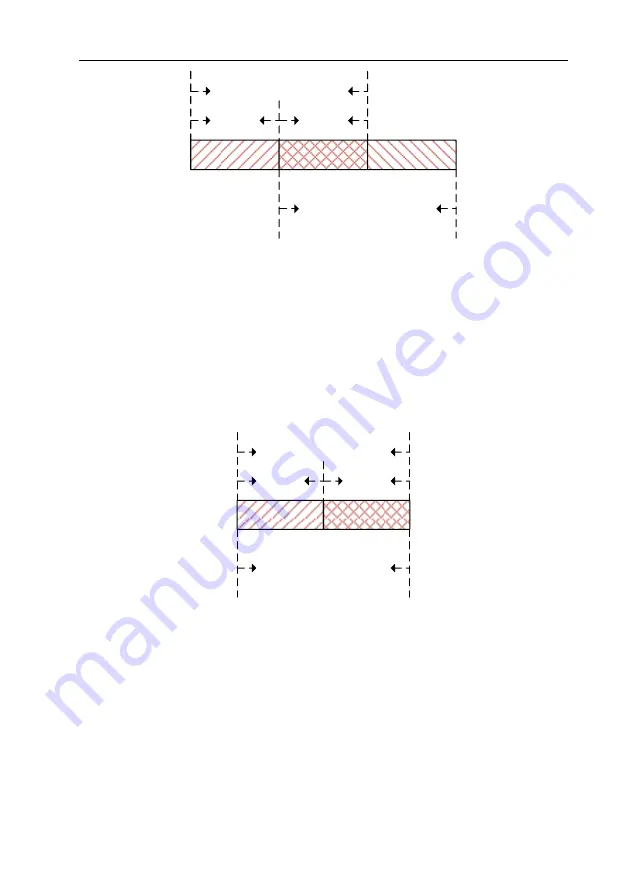
The absolute position command is referenced to the absolute position value relative to zero.
Regardless of the current actual position value, whether or not there is a pulse margin has not
been completed. The absolute position command values are all distances that must be taken
relative to absolute zero . As shown below:
As shown in the figure above, the first position command setting value is PosCmd0. After the pulse
of Pos0 is run, the operation ends and the remaining PosRem0 pulses are not completed. If the
second absolute position command PosCmd1 is inserted at this time, the total number of pulses of
the second position command operation is PosCmd1- Pos0. That is, the second absolute position
value PosCmd1 is the absolute position 0 bit reference point, and the final running position value is
PosCmd1.
9.3.2 Acceleration and Deceleration Time
Position control function during operation, during the operation of the point control function, the
acceleration and deceleration base value is calculated based on the maximum speed of the
motor. . For example, setting the acceleration time of the motor running for 100ms means that
when the motor is running from 0rpm to the maximum speed, it needs to accelerate from 0rpm to
the maximum speed in 100ms.
PosCmd0
PosCmd1
Pos0
PosRem0
PosCmd0
PosCmd1
Pos0
PosRem0
0





















































