





























7-4
Diagnostics and Fault Finding
07-01-08-02-E-V0500 631 Digital Servo Drive
Fault Finding
The following list refers to faults which can occur during operation.
Error
Error
Error
Error
Explanation and remedy
Explanation and remedy
Explanation and remedy
Explanation and remedy
****
Motor does not operate despite current flow
Is the motor mechanically blocked?
Is the motor brake released?
Motor runs unevenly
Check the setpoint wiring. Check grounding and shielding.
Inappropriate speed loop values ?
•
Reduce amplification and/or increase time constant (use
EASYRIDER)
No reaction on setpoint value although
torque in stand still
Limit switch - functions activated ? (BIAS)
No current flow; no torque despite activating
the regulator correctly
Motor cables interrupted?
Interference symptoms with power frequency
Ground loops in setpoint or actual value wiring?
Shieldings laid on both sides?
Signal cables near high voltage cables?
****
Motor takes up preferred positions after
activation
Position encoder or motor cables with reversed poles?
Resolver or encoder incorrectly adjusted?
Number of motor poles set incorrectly? (config. menu)
****
Motor runs up immediately after activation
although there is no setpoint
Motor cables or resolver cables reversed?
Resolver incorrectly adjusted?
Motor reaches, in idling cycle, a very different
speed when running right from running left
Resolver incorrectly adjusted
*
Displays /3./ or /4./ for a short time after activating before showing warning /8./
Re-actions of Supply Voltage Supervising Functions
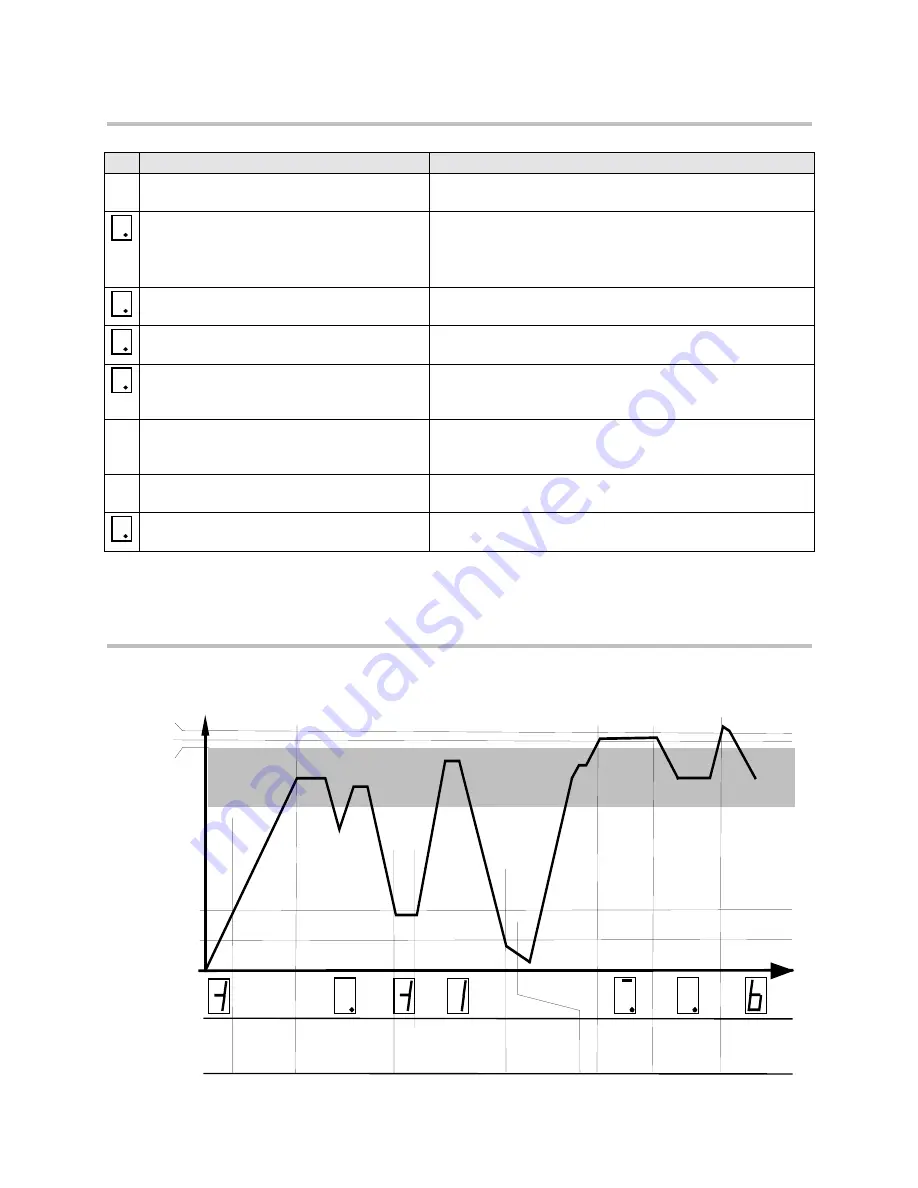
The following diagram refers to the internal dc bus voltage (rectified from an ac voltage). Note
that voltage ripple effects have to be taken in to account, refer to Chapter 11: “Technical
Specifications” - Derating of Output Voltage.
Display
Drive Status
Precharge
ok
Fail
Reset by
power down
2 seconds
Dynamic
Braking
ok
ok
High voltage
Fail
DC 400 V
DC 373 V
DC 280 V
DC 100 V
DC 380 V
t
DC 60V
approximately
Nominal Area
Variations of internal DC Bus Voltage
Low Voltage
*
Default value, may be changed using EASYRIDER
*







































































