



























S5-95F
Blocks and Their Functions
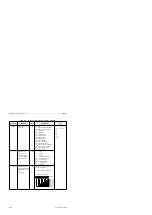
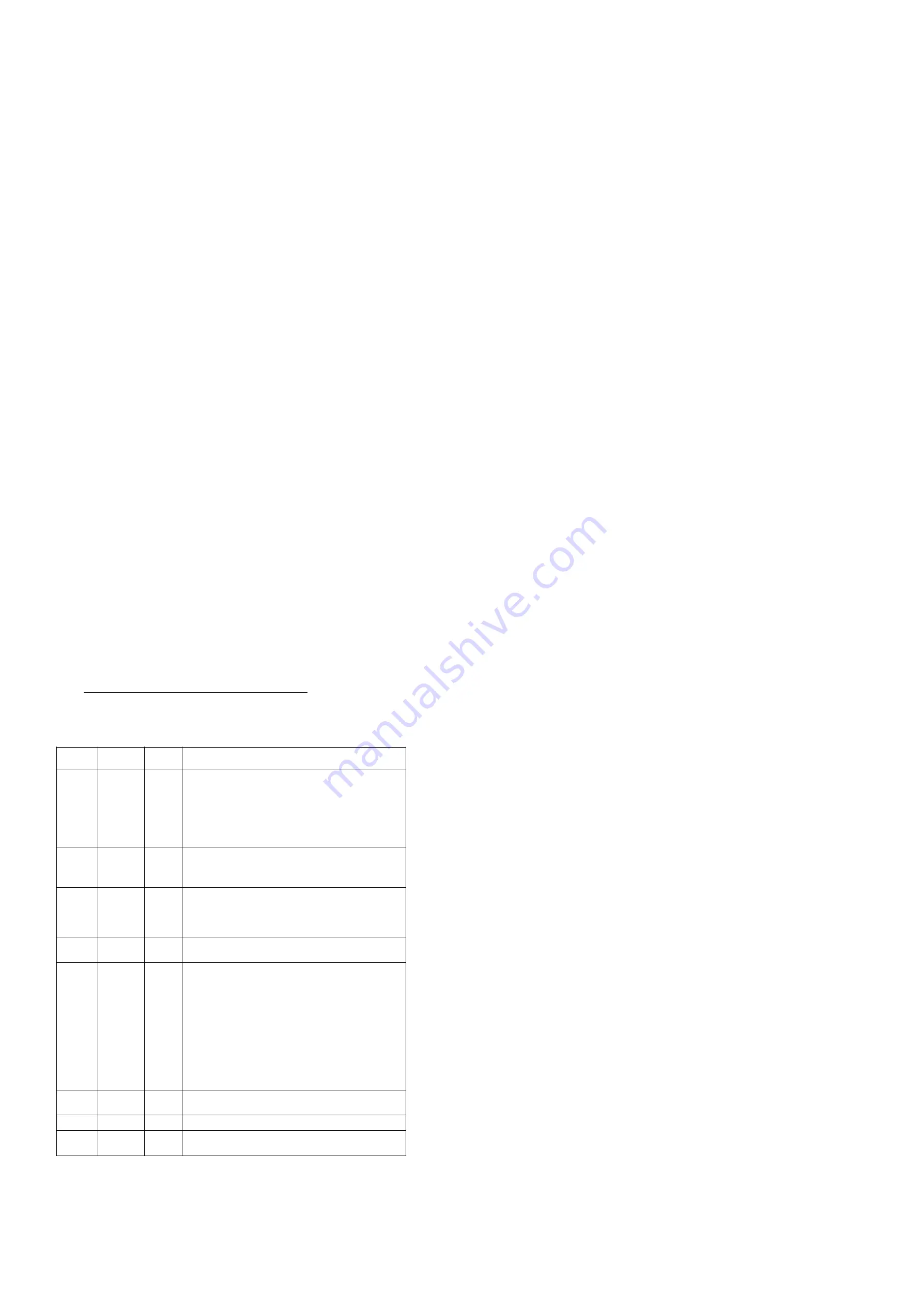
Table 9-4. Description of the Control Bits in Control Word "STEU"
Name
Control
Bit
Signal
State
Description
0
0
1
Manual mode
The following variables are updated in Manual mode:
1) X
K
, XW
K-1
and PW
K-1
2) XZ
K
, XZ
K-1
and PZ
K-1
, when STEU bit 1=1
3) Z
K
and Z
K-1
, when STEU bit 5=0
Variable dD
K-1
is set to 0: The algorithm is not computed.
Automatic mode
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
AUTO
1
0
1
XW
k
is forwarded to the differentiator. The XZ input is
ignored.
A variable other than XW
k
is forwarded to the differentiator
via the XZ input.
XZ EIN
2
0
1
REG AUS
3
0
1
Positioning algorithm
Correction rate algorithm
GESCHW
4
0
1
When GESCHW=0:
Following the transfer to Manual mode, the specified
manipulated variable value YA is adjusted exponentially to the
manual value in four sampling steps. Additional manual values
are then forwarded immediately to the controller output.
When GESCHW=1:
The manual values are forwarded immediately to the
controller output. The limiting values are in force in Manual
mode.
When GESCHW=0:
The manipulated variable last output is retained.
When GESCHW=1:
Correction increment dY
K
is set to zero.
HANDART
5
0
1
With feedforward control
No feedforward control
NO Z
6 and 7
These bits are not assigned.
-
Normal controller processing
When the controller is invoked (OB251), all variables (DW 18
to DW 48 ) with the exception of K, R, TI, TD, BGOG, BGUG,
YH
k
and W
k
are reset in the controller DB. The controller is
deactivated.
8 to 15
The PID algorithm uses these bits as auxiliary flags.
-
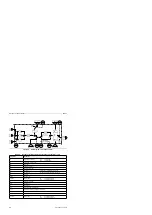
The control program can be supplied with fixed values or parameters. Parameters are input via the
assigned data words. The controller is based on a PID algorithm. Its output signal can be either a
manipulated variable (positioning algorithm) or a manipulated variable modification (correction rate
algorithm).
EWA 4NEB 812 6210-02
9-5







































































