

























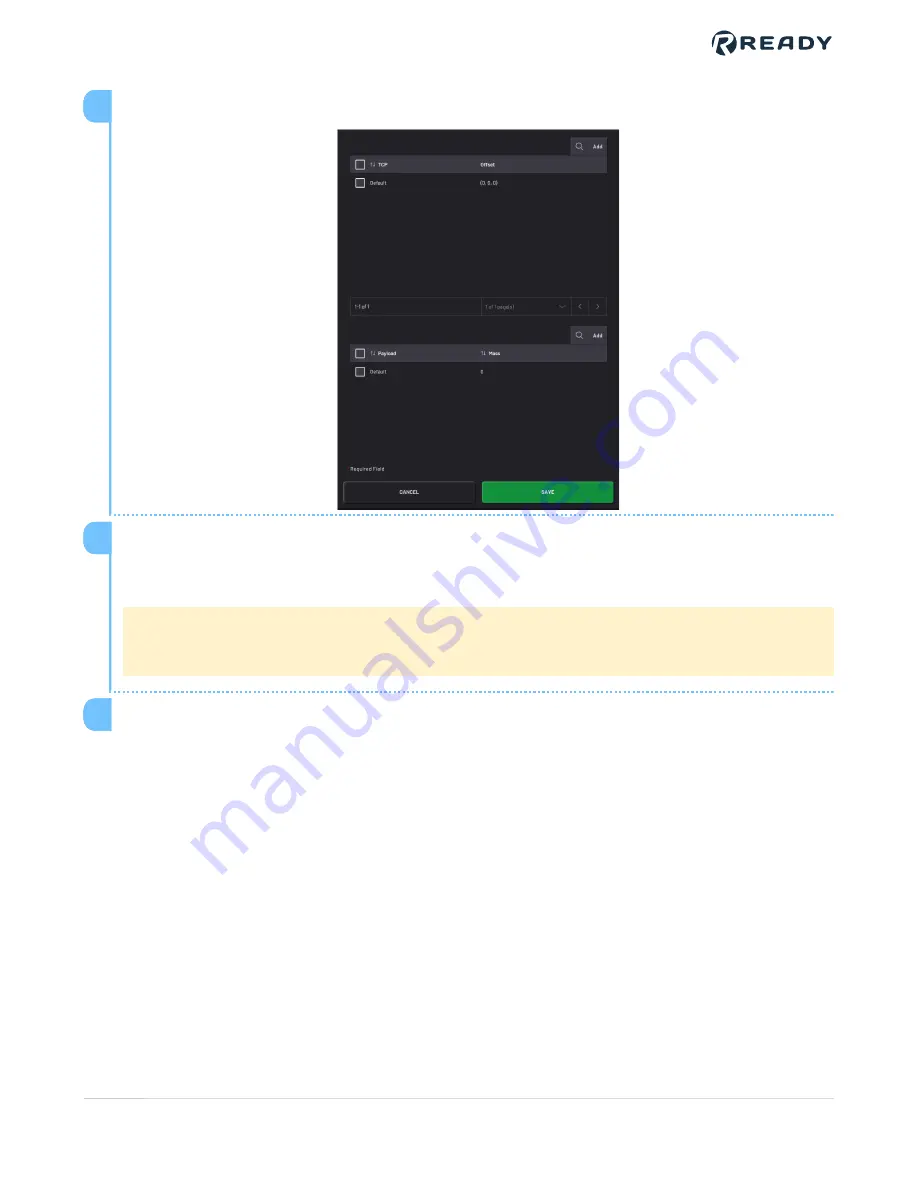
Add all of the TCPs and Payloads you need for your workcell and tap
SAVE
.
4
Tap
SAVE
again to exit the robot configuration. Forge/OS will upload a new tool data file
with all of these TCPs and Payloads onto the USB attached to the Yaskawa Motoman
pendant. If you didn't see one before, you will see a Tool Mismatch error now.
Note:
Forge/OS saves the updated TCPs and Payloads to
tool.cnd
in the USB root
directory, not in the
forge-os
folder.
5
Switch the Yaskawa Motoman pendant to TEACH and select Safety Mode again:
6
VERSION 1.0.0
© 2021 COPYRIGHT READY Robotics ALL RIGHTS RESERVED
61







































































